Európa legmenőbb tesztpályáján néztük meg az önvezető járművek jövőjét

Svédország déli részén, a Göteborgból alig egy órás úttal megközelíthető Borås városa mellett fekszik a világ első olyan tesztpályája, amelyet kifejezetten a jövő közlekedési biztonságának szenteltek, így az önvezető autókból és más autonóm járművekből álló rendszer működőképességét is bizonyíthatják rajta a kutatók.
Az AstaZero nevű pályán november végén egy olyan sorsdöntő EU-s projektet zártak le sikeresen, amelyben a saját területén globálisan is piacvezető magyar cég, a Commsignia is részt vett. A kétéves projekt végső demonstrációját a Qubit a helyszínen követte végig.
A túra legfőbb tanulsága az volt, hogy hiába szólnak a szalagcímek évek óta arról, hogy most már tényleg mindjárt ellepik az utakat az önvezető autók, a dolog ennél sokkal összetettebb – a járművek mellett például elég kevés szó esik az ezt lehetővé tevő közlekedési rendszerről. Ráadásul a váltás nem egyről a kettőre jön majd, a szakértők szerint is hosszú átmeneti időszakra kell számítani, amikor önvezető és nem önvezető autók osztoznak majd az utakon.

Hogy ebben az időszakban se legyen káosz a közlekedésben, a kutatók már dolgoznak a legbiztonságosabb járműkommunikációs technológiák és a szükséges út menti infrastruktúra fejlesztésén. A négy uniós ország hét cégének együttműködésében létrejött PRoPART nevű projekt demójában például egy olyan szituációt mutattak be, ahol egy önvezető kamionnak sávot kell váltania az autópályán, miközben két, ember vezette autó halad el mellette.
Mi kell egy ilyen egyszerűnek tűnő manőverhez? A kamionnak tisztában kell lennie a saját pontos pozíciójával, a mellette haladó járművek pozíciójával, a környező objektumokkal; fel kell ismernie a felszabaduló üres teret, és a térkép alapján az út, a sávok paramétereit is pontosan tudnia kell. Ehhez antennákra, kamerákra, szenzorokra, belső és külső műszerekre, szoftverekre és az ezeket összehangoló megoldásokra is szükség van, ráadásul nem árt az egészet szabványosítani sem, így kézenfekvő volt az EU-s együttműködés.

Ha csak egy kulcsszót kellene kiemelni a projektből, az a pozíció lenne: mivel különböző méretű járművek vannak az utakon, amiknek különböző sebességgel történő mozgás közben is alkalmazkodniuk kell egymáshoz, elengedhetetlen a centiméteres pontosságú helymeghatározás – amit az amerikai GPS-t felváltó európai Galileo műholdas rendszer biztosít.
A projekt
A PRoPART (precíz és kiterjedt helymeghatározás az önvezető közúti közlekedésben) 2017 decemberében indult 3,5 millió eurós büdzsével, amiből 3 milliót az Európai Unió finanszírozott. A cél olyan valós idejű helymeghatározási (RTK) szoftveres megoldás fejlesztése volt, amely a Galileo navigációs műholdrendszer jeleit más pozicionáló és szenzoros technológiákkal ötvözi. Magyarul: rájönni, hogyan lehet a legpontosabb pozíciót hozzárendelni egy járműhöz, hogy az egy önvezető szisztémában a legbiztonságosabban tudjon közlekedni.
A projektben négy ország hét cége vett részt: a svéd Waysure az RTK helymeghatározó szoftverért, a német Fraunhofer IIS a műholdas jelvételért, a spanyol Ceit-IK4 az ultra-szélessávú kommunikációért, a svéd Scania az önvezető kamionért, a német Baselabs az út menti és az autóban lévő szenzorok adatainak egyeztetéséért, a magyar Commsignia pedig a járművek, a hálózat és az infrastruktúra közötti kommunikációért felelt, míg az egész projektet a svéd állami kutatóintézet, a RISE koordinálta.
A legnagyobb kihívást a centiméteres pontosság elérése, a több száz méteres hatótávolság biztosítása, valamint az jelentette, hogy mindezt nagy és változó sebességgel haladó járműveknél kellett elérni.
A magyar partner
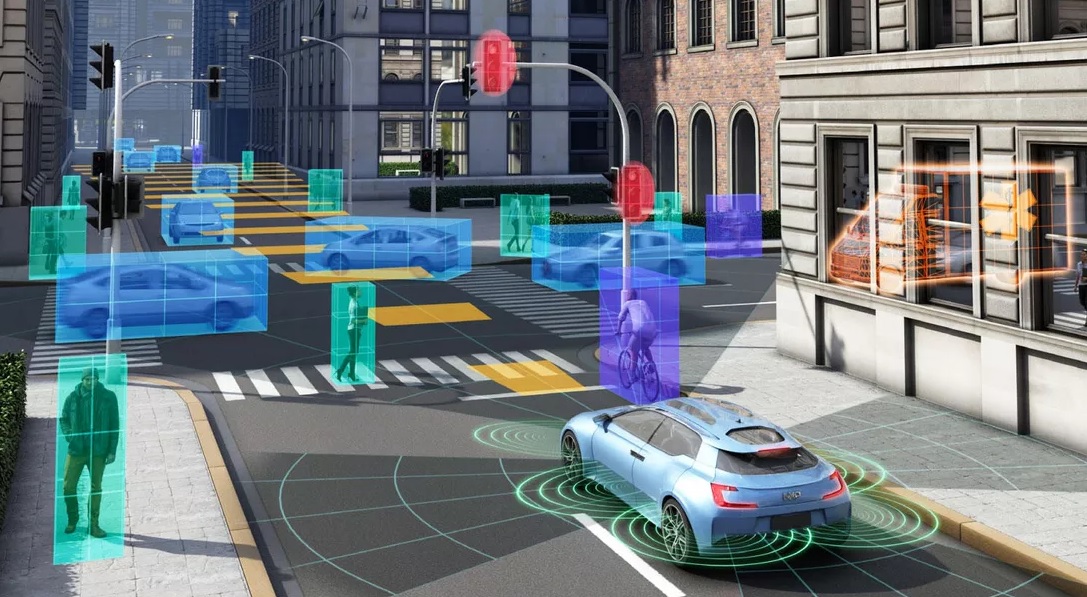
A 2012-ben megalapított Commsignia a kooperatív intelligens közlekedési rendszerek (C-ITS) területén tevékenykedik, ezen belül a V2X (vehicle-to-everything) technológiával foglalkozik, vagyis az olyan szoftveres és hardveres megoldásokkal, amelyek a járművek egymás, illetve a környező infrastruktúra közötti kommunikációja alapján teszi biztonságosabbá a közlekedést. Ezt úgy kell elképzelni, hogy az út szélén meghatározott távonként elhelyezett szenzorok és a járművek fedélzetén található szenzorok adatainak összesítésével fel lehet térképezni, hogy az egyes járművek hol helyezkednek el egymáshoz képest, mikor lehet előzni, vagy épp hol volt baleset, melyik az ideális útvonal, mely szakaszokat érdemes kerülni.
„V2X nélkül nem lehet elérni az 5. szintet” – mondta Váradi András, a Commsignia kutatási igazgatója az önvezető járművek legmagasabb automatizáltsági szintjére utalva. A legtöbb fejlesztés alatt álló önvezető autó ugyanis csak a saját eszközeire (radar, lidar, kamera, szenzorok) hagyatkozik a környezete felmérésénél, de ez nemcsak jelentős mértékben korlátozza a jármű rendelkezésére álló releváns közlekedési információ mennyiségét, hanem kevésbé biztonságos is, mint a plusz külső szenzorokkal biztosított V2X rendszerek.

A Commsignia a Szilícium-völgyben és Budapesten is aktív, a nagyjából 50 fős munkaerő pedig hamarosan megháromszorozódhat, ugyanis néhány hónapja zárt egy 11 millió dolláros (közel 3,3 milliárd forintos) befektetési kört. A vállalat 17 konzorcium tagja, részt vesz a szabványosítási folyamatokban, és többek közt a legnagyobb amerikai okosváros-projektben, Las Vegasban is a Commsignia rendszerét használja egy önvezető busz a navigációhoz.
A pálya
Az AstaZero akár egy hangzatos, de üres fantázianév-választásnak is tűnhet (és ezzel nem lenne egyedül a techvilágban), pedig megvan a jelentése: első tagja az Active Safety Test Area (aktív biztonságiteszt-terület) rövidítése, a második pedig a svéd parlament kihirdetett tervére utal, amely a halálos vagy súlyos sérülést okozó közlekedési balesetek számát kívánja zéróra csökkenteni.
A pálya több elkülönített szegmensből áll: a közel 6 kilométeres autóút mellett egy berendezett városi környezet, egy gyorsulási terület és egy többsávos autópálya-szakasz is található a csak busszal bejárható óriási területén, és a különböző tesztekhez akár robotgyalogosokat, műállatokat, esőszimulátort és ködgépet is kínál.

A PRoPART esetében ilyenekre nem volt szükség – a nagyjából 600 méteres autópálya-szakaszon csak a 200 méterenként elhelyezett három út menti egység, a 40 km/h-s sebességgel haladó önvezető kamion, valamint két ember vezette autó volt jelen.
A teszt
Az AstaZero főépületében lezajlott előadássorozat után két busz szállította a projekt résztvevőit és a vendégeket a teszt helyszíne felé, miután mindenki aláírta a pályán zajló további teszteket védő titoktartási szerződést, és felvette a kötelező láthatósági mellényt. Néhány perces utazás után megérkeztünk az irányítóközponthoz, amelynek emeletéről be lehetett látni a teljes autópálya-szakaszt. Előtte szépen körbejárta mindenki az egyébként hétköznapi kamionnak tűnő Scaniát, amely csak a két oldalán és az elején elhelyezett radarok, valamint a tetőre illesztett okoskamera miatt keltene feltűnést közúton.
Három szituációban kellett teljesítenie a kamionnak: az elsőben a mellette haladó két autó közül az egyik lehagyja, a másik lemarad, és a kettő közé kell bekanyarodnia; a másodikban mindkét kocsi elhalad mellette, és utána kell sávot váltania; a harmadikban pedig azt kell érzékelnie, hogy végig mellette halad mindkét autó, így nem szabad sávot váltania.
A vezérlőteremben összegyűlt 20-25 ember a négy monitoron kivetített adatokon, egy élő 3D-s szimuláción, valamint a kamion belső terébe és a hátsó autó elejére felszerelt kamerák képein keresztül követhette a tesztet, és bár a többször elpróbált gyakorlatok a végső demón is gond nélkül lezajlottak, a projektben közreműködők végig feszülten figyelték, hogy minden rendben megy-e.

A kamion minden feladatot sikeresen végrehajtott, és az egyik monitor képén felvillanó piros és zöld lámpák alapján valós időben lehetett követni, hogy az öt biztonsági rendszer közül melyik érzékeli éppen a felszabaduló üres területet – a jármű csak akkor válthatott sávot, ha mind az öt lámpa zöldre váltott. A beépített biztonsági szűrőknek köszönhetően pedig még akkor sem okoz balesetet az önvezető kamion, ha egy századmásodpercre véletlenül az összes lámpa zöldre vált, ebben az esetben ugyanis még egy tartalék biztonsági ellenőrzést lefuttat a rendszer.
Stefan Nord, a PRoPART koordinátora a teszt után elmondta, hogy a kutatási projekt sikeres lezárása után a kifejlesztett termékek és megoldások a saját útjukra indulnak, vagyis az itt közösen megszerzett tudást mindenki a maga piacán hasznosíthatja. Az ilyen projektek viszont a szabványosításnak is jót tesznek, hiszen ha például a Baselabs elkezdi árulni az adatfúziós szoftverét, akkor a vevőnek már nem kell nagyon kutatni az azzal kompatibilis V2X megoldások után, hiszen a Commsignia termékeit vele együtt fejlesztették.
Az elkerülhetetlen jövő
Az első V2X rendszert használó autót már be is jelentették: a Volkswagen Golf 2020-ban érkező nyolcadik generációs modellje már a wifi-alapú V2X csippel együtt kerül hamarosan a piacra. A cég szerint fontos minél előbb bedurrantani az európai V2X-penetrációt, hiszen minél több autó, útmenti szenzor vagy épp közlekedési lámpa kerül az utakra, amely képes az ilyen kommunikációra, annál fejlettebb és biztonságosabb lesz az elkerülhetetlen önvezető jövő.
Ami, persze, ki tudja, mikor is jön el. „Volt egy olyan általános vélekedés egy-két éve, hogy már elég jók az algoritmusok, úgyhogy bármelyik pillanatban eljöhet az önvezető autók ideje. Aztán jöttek a balesetek, köztük halálosak is, és most már sokkal óvatosabban kell jósolnunk” – mondta a Kaliforniai Egyetem szakértője a CNBC-nek november végén, miközben Elon Musk még pár hónapja is arról álmodozott, hogy az év végéig elkészül a teljesen önvezető Tesla.
Az Amazon önvezető projektje, az Aurora vezére szerint még öt éven belül is legfeljebb néhány száz vagy ezer, elsősorban csomagokat szállító önvezető autó jelenhet meg az amerikai utakon, és ez idő alatt egy cél kell, hogy lebegjen az érdekelt cégek előtt: az infrastruktúra biztonsági megoldásait kell addig tesztelni, amíg nem garantálható, hogy balesetmentes közlekedést tud biztosítani az önvezető járművek rendszere.
Kapcsolódó cikkek a Qubiten:
Biztonságosabbak lesznek az utak, ha emberek helyett algoritmusok vezetik az autókat?
Az Európai Parlamentben megszavazták az önvezető autók komolyabb kutatását sürgető indítványt, de a technológia még mindig számtalan kérdést vet fel. Meg lehet-e valósítani egy ilyen rendszert biztonságosan és etikusan? Végleg eltűnnek az emberi sofőrök? És ha igen, mikor?

Patrick Lin: A robotautóktól nem lesz több szabadidőnk, inkább még többet dolgozunk majd
A politika, a piac, a nép vagy egyetlen programozó dönt majd arról, mit tegyen egy önvezető autó, ha baleset fenyeget? Miért nem feltétlenül jó a kevesebb közúti baleset gazdasági és egészségügyi szempontból? Mi lesz a kamionsofőrökkel? Aki válaszol: Patrick Lin filozófus, robotetikus.

Volvo: Vállalnunk kell az önvezető autókkal járó kockázatot
Az önvezető tesztek presztízsromboló kockázatairól és az elektromos hajtású járművek kínai fellendüléséről kérdeztük budapesti látogatásakor Lex Kerssemakerst, a Volvo Cars International európai, közel-keleti és afrikai piacokért felelős holland vezetőjét.