Patrick Lin: A robotautóktól nem lesz több szabadidőnk, inkább még többet dolgozunk majd

Az önvezető autók kronológiájában mostanában jutottunk el arra a pontra, hogy a gyártás és a tesztelés után lassan el kell kezdeni törvényekkel szabályozni, milyen keretek között járhatják az utakat. Ez a technológiai kérdéseken felül számos erkölcsi problémát is felvet. Sofőr hiányában ki a felelős egy közúti balesetért? Ha választani kell, egy terhes nőt szállító autóba vagy egy bicikliző kamaszfiúba ütközzön az autó? És mihez kezdjünk a szabadidőnkkel, ha egy kétórás utazás során már nem a vezetésre kell koncentrálni?
Erről beszélt a Qubitnek Patrick Lin, a Kaliforniai Állami Műszaki Egyetemen (Cal Poly) működő Erkölcs + Fejlődő Tudományok (Ethics + Emerging Sciences) intézetének igazgatója, a Cal Poly és a Stanford Egyetem filozófiaprofesszora, aki több könyvet írt a technológiai erkölcsről és a robotetikáról.
Qubit: Kinek kell meghozni az önvezető járművek morális döntéseit: a programozóknak, a cégeknek vagy a kormányoknak? Sikerült már ebben konszenzusra jutnia a tudománynak?
Patrick Lin: Jelen állás szerint a termékfejlesztés a cégek feladata, amik a piaci viszonyokra reagálnak. Néha, mint például a gyógyszerek, járművek vagy más potenciálisan veszélyes termékek esetében, külső szabályozókat is bevonnak a folyamatba, akik a közvéleményt képviselik. Ez a felosztás korrektnek tűnik. Minden iparág kétségbeesetten várja a szabályozók útmutatását, mivel a kockázat óriási lehet, és biztosra akarnak menni, hogy megvan minden engedély, ami csökkentheti a felelősségüket.
De a szakértelem is számít. Például, ha egy házat építesz, kíváncsi lehetsz profi építészek és mérnökök tanácsára. Miért lenne ez másképp az etikai kérdések esetében? Nem titok, hogy a filozófusok körében még mindig vannak viták a „helyes” etikai elméletről, de erre a gyakorlati etikában nincs is szükségünk – elég, ha különböző etikai elméletek módszereit használjuk arra, hogy felvázoljuk a lehetőségeket. Az, hogy egy önvezető járművet hogyan programozzanak, végső soron politikai döntés, amihez szükséges a közvélemény beleegyezése is. Ez természetesen nem azt jelenti, hogy a népnek mindig igaza van, de az emberek meghatározó szereplői a folyamatnak, és ha valamivel nem értenek egyet, vagy meg sem kérdezik őket, akkor az ipar kudarcra van ítélve.
Elképzelhető, hogy a különböző önvezető járművek más-más etikai alapelvek szerint működnek majd? Lesz olyan univerzális alapelv, amely mindegyikre vonatkozik, vagy ez versenyjogi problémákat szülne?
Úgy tűnik, hogy megvan a helyük a különböző megközelítéseknek. Végül is most sem várjuk el, hogy minden autónak ugyanolyan legyen a gyorsulása, a maximális sebessége, vagy más olyan tulajdonsága, ami veszélyesebbé teheti az adott autót. Nem követelünk egyforma sebességkorlátozást a világ különböző pontjain, de még arra sincs univerzális szabvány, hogy az út melyik oldalán vezessenek az emberek. Egy önvezető sportautónak például lehetnek agresszívabb beállításai a meghatározott etikai határokon belül. A tárgyalt erkölcsi alapelvek közül többre amúgy sincs objektív válasz.
De van itt valami az univerzális alapelvvel kapcsolatban. Gondoljunk bele, milyen zavaros lenne, ha például különböző országokban különböző jelzőtáblákkal találkoznánk. Ezért jött létre a Bécsi Közúti Közlekedési Egyezmény és más nemzetközi megállapodások. Legyenek szabványai az önvezető autózásnak? Erről még folynak viták. Ennek lennének előnyei a hatékonyságot, a kommunikációt és a különböző önvezető járművek együttműködését tekintve, de magában rejti azt a veszélyt is, hogy túl korán állítanánk fel egy szabványt. Ezen a ponton még elfogadható a „Virágozzék száz virág!” elve, megfelelő felügyelet mellett, az etikai szakértőket is ideértve.
Évek óta gyártanak és tesztelnek önvezető autókat. Létezik már egyáltalán olyan technológia, amely képes különbséget tenni emberek, állatok és a közlekedés többi szereplője között?
A számítógépes látásnak, beleértve a képfeldolgozó algoritmusokat is, még van hová fejlődnie. Még mindig nehezen ismernek fel kisebb tárgyakat, állatokat, de az árnyékok és a sötétebb helyek, például a kátyúk között sem tudnak könnyen különbséget tenni. Esőben és rossz időjárási viszonyok között nagyon rosszul működnek, és ez világszerte alapvető problémákhoz vezetne. Ezért a helyes út az, amikor többféle érzékelőrendszert használnak, a digitális kamerától a radaron és a lidaron át más feltörekvő technológiákig.
Ezzel együtt már meglepően jól működnek. Meg tudnak különböztetni egy gyalogost egy biciklistől, egy állattól vagy egy autótól. És azt is tudjuk, hogy a laptopjaink és az appjaink olyan arcfelismerő technológiával rendelkeznek, amely azonosítani tud különböző személyeket – tehát elméletben a robotautók is képesek lehetnek erre, bár azt egyelőre nem tudjuk, hogy az autópályán megszokott sebességnél mire mennének a mai kamerák.
Ha fontosnak tartjuk, hogy a robotautók azonosítani tudjanak különböző dolgokat az úton, kiépíthetünk egy jármű-jármű (V2V) kommunikációs rendszert, egy jármű-infrastruktúra (V2I) rendszert, vagy akár mindkettőt (V2X). Ez megvalósulhat úgy, hogy valamiféle címkét vagy jeladót helyezünk az autókra, bukósisakokra, vagy gyalogosok esetén az okostelefonokra, és így tovább. De ez sokkal nagyobb munka lenne, mint fejlettebb szenzorokat készíteni, és a rendszer meghibásodására vagy kijátszására is sokkal több lehetőséget nyújtana.
Elképzelhető, hogy az életek rangsorolása lesz a megoldás? Ha igen, a rangsort nyilvánosságra kell hozni, hogy mindenki tudja, mennyit ér az élete egy önvezető autó szemében?
Már most is rangsoroljuk az életeket, gondoljunk csak a betegek osztályozására a kórházakban, vagy éppen a szervátültetések várólistájára. De ezek drasztikus esetek, ahol nincs más választás. Az önvezető autók esetében egyelőre a közelében sem vagyunk ezeknek. Embereket rangsorolni nem olyan, mint egy egyszerű hitelbírálat – közvetlenül érinti a méltósághoz és az élethez való jogukat. Persze nem minden államot érdeklik ezek a dolgok, de szerencsére nem is azok az államok fejlesztik a technológiát.
Amiről most beszélnünk kell, az a felelősség és a kockázat kérdése, például hogy az önvezetők az utasaikhoz legyenek hűek, vagy az olyan védtelen közlekedőkhöz, mint a gyalogosok. De arról is viták folynak, hogy például egy úttesten szabálytalanul átkelő gyalogosnak mekkora felelőssége van egy balesetben, hiszen az lehet egy gondtalanul szaladgáló kisgyerek is, akinek semmilyen bűnös szándéka sincs.
Mi lehet a következménye annak, ha hirtelen felszabadul az emberek korábban vezetéssel töltött ideje?
Sokan úgy gondolják, hogy ha már nem kell majd vezetésre időt fordítani, akkor helyette azt csinálunk majd, amit csak szeretnénk, az alvástól a filmezésig. Én szkeptikus vagyok ezzel kapcsolatban, mert az informatika történelme nem erre enged következtetni. Gondoljunk csak bele, mennyi időt kellett volna már megspórolnia nekünk a modern technológiának, a szövegszerkesztéstől az online vásárlásig. Most mit kezdünk ezzel az idővel? Valószínűleg még több munkával töltöttük be azt a vákuumot. Így én arra tippelek, hogy a robotautók az iroda kiterjesztései lesznek. Persze, biztosan lesznek, akik alszanak vagy olvasnak, ahogy a repülőn vagy a vonaton, de általában a technológia által felszabadított időt felemésztik az élet könyörtelen nyomásai, amik közül sokat saját magunk generálunk.
Milyen egyéb erkölcsi kérdéseket vetnek fel az önvezető járművek? Gondolok itt például az adatvédelmi problémákra, vagy olyan társadalmi hatásokra, mint az az elmélet, amely szerint az emberek több alkoholt fogyasztanak majd, miután az ittas vezetés nem létező problémává válik.
Igen, rengeteg olyan erkölcsi kérdés van, amely nem közvetlenül a balesetekhez kapcsolódik. Például, hogy kinek a felelőssége az önvezető autók közúti tesztelése? Jelenleg úgy tűnik, hogy az emberek akaratlanul is alanyai egy kísérletnek, mivel általában a fejük felett döntenek el a tesztelésre adott engedélyekről. Vagy, ha az önvezető autók olyan biztonságosak, hogy nem lesznek közúti szabálysértések és balesetek, akkor kiesik egy jelentős bevételi forrás az önkormányzatoknál, és felborul a szervátültetési listák rendje is, amelyek nagyban támaszkodnak az autóbalesetek áldozataira. De más iparágakat, életeket is felforgathatnak a robotautók – például mi lesz azokkal, akik az autóbiztosításból élnek?
Lehetséges egyáltalán törvényeket hozni az önvezető autókról, ha azok hatásai ennyire kiszámíthatatlanok?
Természetesen igen. Lehet, hogy nem látunk még tovább a rövid- vagy középtávú hatásainál, de egyelőre csak annyi a dolgunk, hogy a jelenlegi körülmények között a legjobb érveket hangoztassuk, és a lehető legtöbb perspektívát felvonultassuk. Ha nem így tennénk, azzal engednénk, hogy a piac irányítsa a folyamatot, és a piacot vezérlő erők – mint a hatékonyság, árképzés, márkaépítés stb. – nem feltétlenül ugyanazok, amik a társadalom számára a leghasznosabbak.
Például óriási munkaerőpiaci zavarba torkollhat, ha nem készülünk fel időben arra, hogy a robotautók miatt állásukat vesztő munkásokat át kell képeztetni. A rangsor elején a kamion-, a taxi- és egyéb alkalmazott sofőrök állnak, de a hagyományos autószerelők is veszélyben vannak. Az etikus programozásra visszatérve, rengeteg bizonytalanság van egy esetleges balesettel kapcsolatban, de így vagy úgy, valakinek – legyen az a programozó, a gyártó cég, vagy egy, a népet képviselő csoport – meg kell hoznia a döntést.
Az interjú eredetileg az Európai Unió tudománykommunikációs portálján, a European Science-Media Hubon jelent meg, angol nyelven.
Kapcsolódó cikkek a Qubiten:

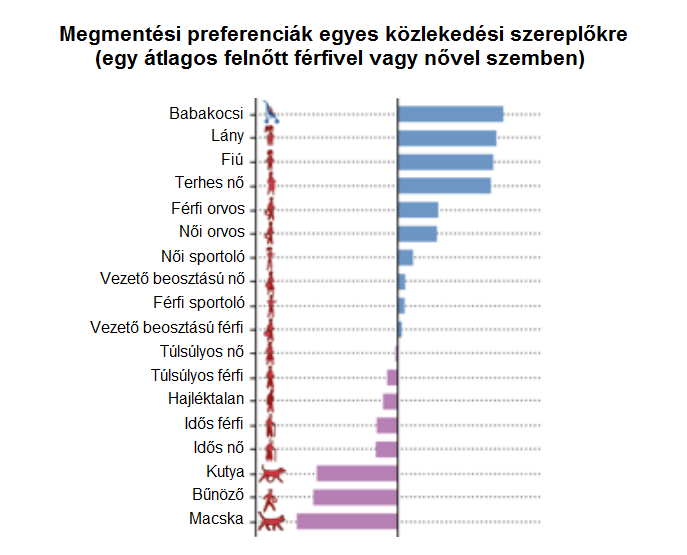
Az emberek többsége inkább megölne egy bűnözőt, mint egy kutyát
Kit üssön el egy önvezető autó, ha elkerülhetetlen a baleset, és te dönthetsz életről és halálról? A magyarok a magas státuszúak, a fiatalok és a nők életét kímélnék meg leginkább.

Nemcsak a dugót és a parkolójegyeket, de a biciklizést és a teljes autós kultúrát is eltörölheti az önvezető járművek kora
A 2020-as évek a közlekedés teljes megújulását hozzák majd a legtöbb jóslat szerint, az új technológia viszont cserébe teljes iparágakat tehet tönkre, és az is kérdés, mi lesz a birtoklásra épülő autómániával.

Kinyírnád a fél emberiséget, hogy megmentsd a másik felét?
Döntsön életről és halálról egy önjelölt világmegváltó, aki megígéri, hogy igazságos döntést hoz, vagy próbáljunk meg olyan közösségi döntést hozni, amely lehetőség szerint egy mindenki számára nyilvánosan igazolható eljárást követ?