Sűrített levegővel működő négylábú robotot épített egy kutatócsoport

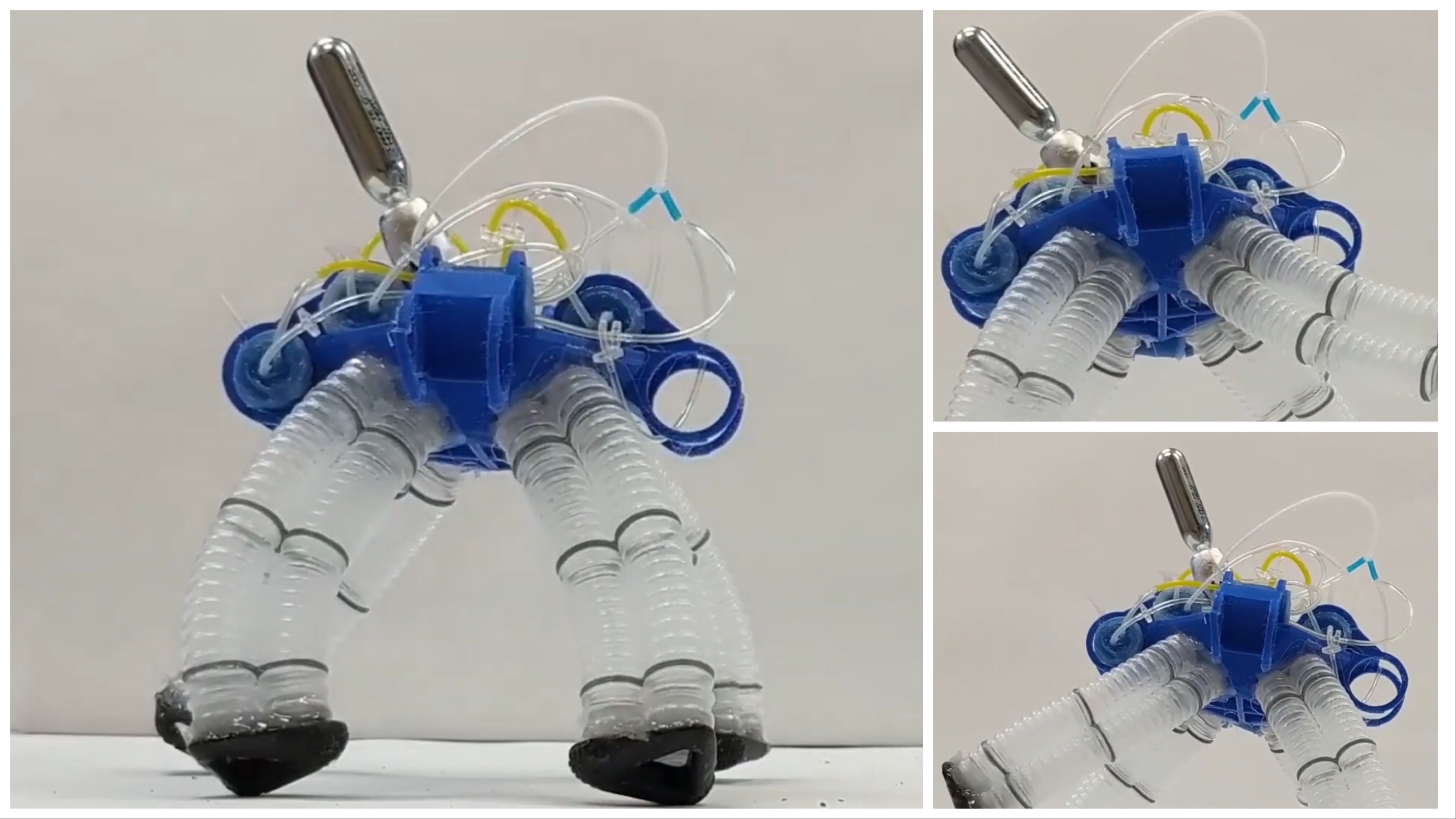
A San Diegó-i Kaliforniai Egyetem mérnökei által készített négylábú robot működéséhez nincs szükség elektronikára, csak sűrített levegőre. A robot összes funkcióját állandó nyomású sűrített levegő működteti, beleértve a vezérlést és a mozgást is.
A Michael T. Tolley professzor vezette kutatócsoport a Science Robotics folyóirat február 17-én megjelent számában mutatta be az új fejlesztést.
„Ez a munka egy alapvető, de jelentős lépés lehet a teljesen autonóm, elektronikamentes lépegető robotok fejlesztése felé.”
– mondta a Techxplore hírportálnak Dylan Drotman, a tanulmány szerzője.
Az olcsón előállítható robotok elsődleges felhasználási területe a szórakoztatóipar (például a játékgyártás), illetve az olyan környezetek, ahol nem használhatnak elektronikus eszközöket – például MRI eszközökben, vagy nehezen megközelíthető bányákban. Az úgynevezett puha (soft) robotok iránti érdeklődést az is táplálja, hogy ezek könnyen alkalmazkodnak a környezetükhöz, és biztonságosan működtethetők emberek közelében.
A puha robotok többsége sűrített levegővel működik, de a vezérlésük elektronikaalapú. Az elektronika megépítéséhez komplex alkatrészek szükségesek – nyomtatott áramkörök, szelepek és szivattyúk –, amiket gyakran a robot testén kívül helyeznek el. A robot központi idegrendszerét képező rendszerek általában ormótlanok és drágák, de a San Diegó-i kutatók eszközét olcsó és könnyűsúlyú pneumatikus elemek mozgatják. A vezérlés utasításalapon történik, de a robot a környezetből érkező jelek észlelésére is képes.
„Ezzel a megközelítéssel egy igen komplex robotagyat alkottunk. Elsősorban arra koncentráltunk, hogy megépítsük a legegyszerűbb, levegővel hajtott idegrendszert, ami a sétálás szabályozásához szükséges.”
– mondta Michael T. Tolley, a tanulmány vezető szerzője.
Hogy is működik?
A robotot három, inverterként működő szeleppel látták el, amik nyomás alá helyezik a levegővezérlésű áramköröket, és késleltetik a nyomást az egyes invertereknél.
A végtagok forgásirányát egy puha szelep szabályozza, amely az óramutató járásával ellentétes és megegyező irányba is elforoghat. Ez a szelep két bemenettel és négy kimenettel rendelkező kapcsolót szabályoz.
A robot mind a négy lába három fokozatban, három izom mozgatásával szabályozható; ezek három párhuzamos, egymáshoz kapcsolt pneumatikus hengerből állnak, amelyek harmonikaszerűen kapcsolódnak egymáshoz, és 45 fokos szögben hajlíthatók. Ha egy hengert nyomás alá helyeznek, a végtag az ellenkező irányba hajlik el; így biztosítható a járáshoz szükséges többtengelyes hajlítás. A vezérlési problémák leegyszerűsítéséhez a kutatók átlósan párosították a lábakat; ez az oka, hogy a robot kissé kacsázva mozog.
A robot működési elve nagyjából az emlősök reflexeit imitálja, amiket inkább a gerinc, mint az agy idegválaszai vezérelnek. A kutatók az állatok idegi áramkörei, az úgynevezett központi mintagenerátorok ihlették; ezek nagyon egyszerű elemekből generálhatnak olyan ritmikus, mozgásvezérlésre szolgáló mintákat, mint amilyen a séta vagy a futás.
Az oszcillátorként működő szeleprendszerek meghatározzák, hogy a sűrített levegő milyen sorrendben jut el a robot négy végtagjában működő izmokba. A kutatók egy olyan komponenst is beépítettek a robotba, amely a járás folyamatosságát késleltetett levegő-befecskendezéssel szabályozza.
A robotot ezenfelül egyszerű mechanikus szenzorokkal is felszerelték: ezek kis méretű, puha, folyadékkal töltött buborékok, amelyek nyomás alá helyezve megfordítanak egy szelepet, ami arra készteti a robotot, hogy a másik irányba mozogjon.
Kapcsolódó cikkek a Qubiten:

Törökország és Izrael már csak lépésekre van a gyilkos robothadsereg bevetésétől
Egy friss jelentés szerint a világ legnagyobb fegyvergyártó cégei még mindig nem vállalták nyilvánosan, hogy tartózkodnak a halálos autonóm rendszerek gyártásától, és az 50 vizsgált cég közül csak 4 nevezhető biztonságosnak.

Szépen száll a robotgalamb, amely segíthet megérteni, hogyan repülnek a madarak
Korábban úgy gondolták, hogy minden egyes szárnytoll mozgása fontos a madarak repülésénél, de egy új kísérletben sikerült csak két fő terület mozgatásával robotgalambot reptetni.

Megérkezett Magyarországra Spot, a Boston Dynamics csótányszerű robotkutyája
Nem sárga, mint a szériadarabok, hanem neonzöld, nem Spotnak hívják, hanem Alíznak, és nem célfeladatot lát el, hanem innovációra ösztönöz. A zöld gépállat funkcionalitása korlátozott, az árából házat vehetnénk, a haszna még nem látszik, mégis jó, hogy van.