Repülni, gördeszkázni és kötélen sétálni is tud a Caltech új robotja, Leonardo

A Kaliforniai Műszaki Egyetem (Caltech) kutatói olyan kétlábú robotot építettek, amely újfajta mozgási technológiák alkalmazásával komplex mozgásformák elvégzésére is képes. A robot Leonardo névre hallgat, ami egy amerikai mércével is erőltetett mozaikszó (LEgs ONboARD drOne), de a kutatók csak Leónak nevezik.
A robot nemcsak két lábon járni, de repülni, gördeszkázni és kifeszített kötélen sétálni is tud. A Caltech közleménye szerint Leo az első robot, amelynek több csuklóval ellátott lábakat és propelleres hajtóműveket használ ahhoz, hogy magas fokon tudjon uralkodni az egyensúlya fölött.
A Leót építő kutatók elsősorban azt a mozgásformát igyekeztek lemásolni, amikor a madarak a szárnyaik csapkodásával és kis szökkenésekkel közlekednek az utcai vezetékeken – ezt egy olyan komplex mozgásformának írják le, ami félúton van a sétálás és a repülés között.
A két mozgásforma metszéspontját a dinamika és az irányítás szemszögéből vizsgálták, és a megfigyeléseiket arra használták fel, hogy Leo a korábban fejlesztett kétlábú robotoknál jobban tudjon közlekedni a kihívást jelentő terepeken is, ahol még a legfejlettebb robotok is elbuknak. A hajtóművek ezért szinkronban mozognak a láb csuklóival, ami meggyőző egyensúlyt biztosít Leo számára. Így attól függően, hogy milyen terepre téved, a robot sétálni, repülni, valamint a kettő ötvözésével szökkenni is képes.
A körülbelül 76 centiméter magas robot lábait három-három csukló működteti, míg a propelleres hajtóművet a vállaira szerelték. A meglehetősen könnyű lábakkal ellátott robotot a propellerek tartják egyenesen mozgás közben, míg a láb csuklói a tömegközéppontot előre helyezik, a sétáláshoz és a repüléshez használt szinkronizált vezérlő segítségével.
A kutatók következő lépésben merevebb lábakkal igyekeznek ellátni a robotot, hogy azok jobban meg tudják tartani a súlyát, és növelni tudják a propellerek által kiváltott tolóerőt.
Kapcsolódó cikkek a Qubiten:
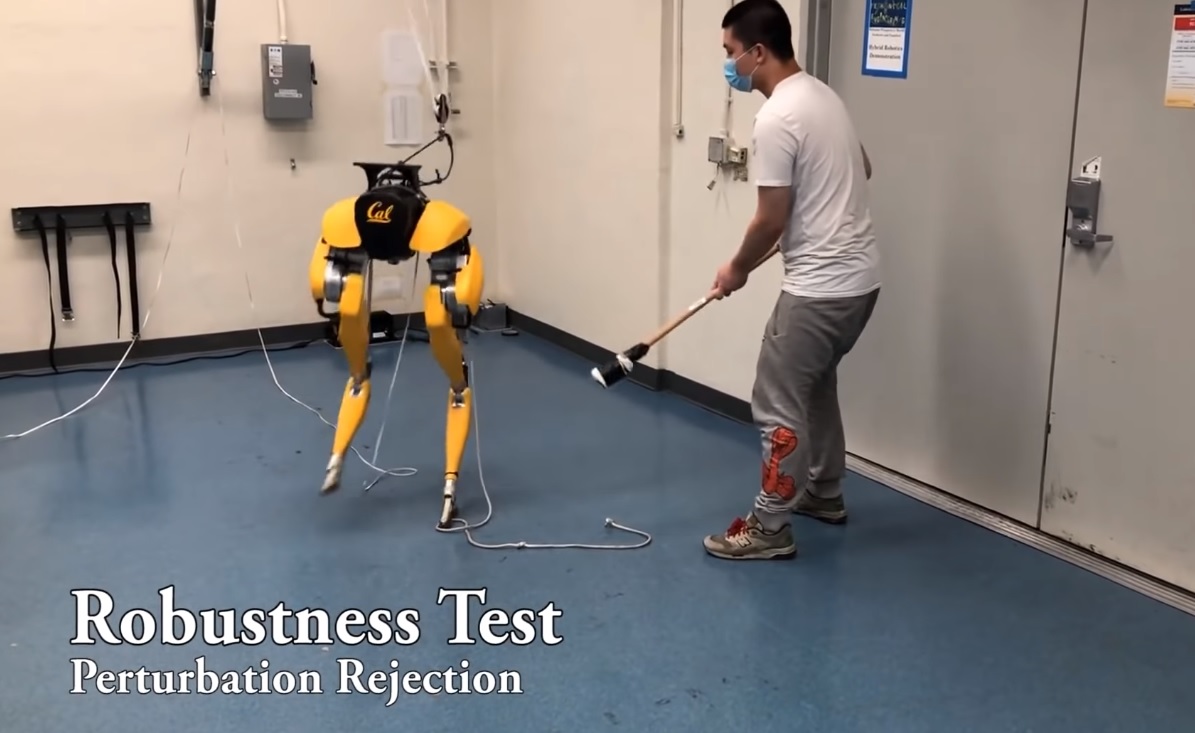
Magától tanult meg járni Cassie, a Berkeley-n fejlesztett kétlábú robot
Míg a Boston Dynamics látványosan táncoló robotjai a mérnökök finomhangolásának köszönhetik tudásukat, a Kaliforniai Egyetemen fejlesztett Cassie mesterséges intelligenciája rengeteg próbálkozás után, saját erőből tanult meg sétálni és lábon maradni a legkülönbözőbb körülmények között.

Táncoló robotokkal kíván boldog új évet a Boston Dynamics
Két humanoid robot és egy robotkutya rázza a Dirty Dancingből is ismert slágerre, a Do You Love Me-re. Az amerikai robotfejlesztő vállalat ezzel kíván jobb évet, mint 2020, bár nehéz nem arra gondolni, hogy a robotok az emberiség kiirtását ünneplik a videón.
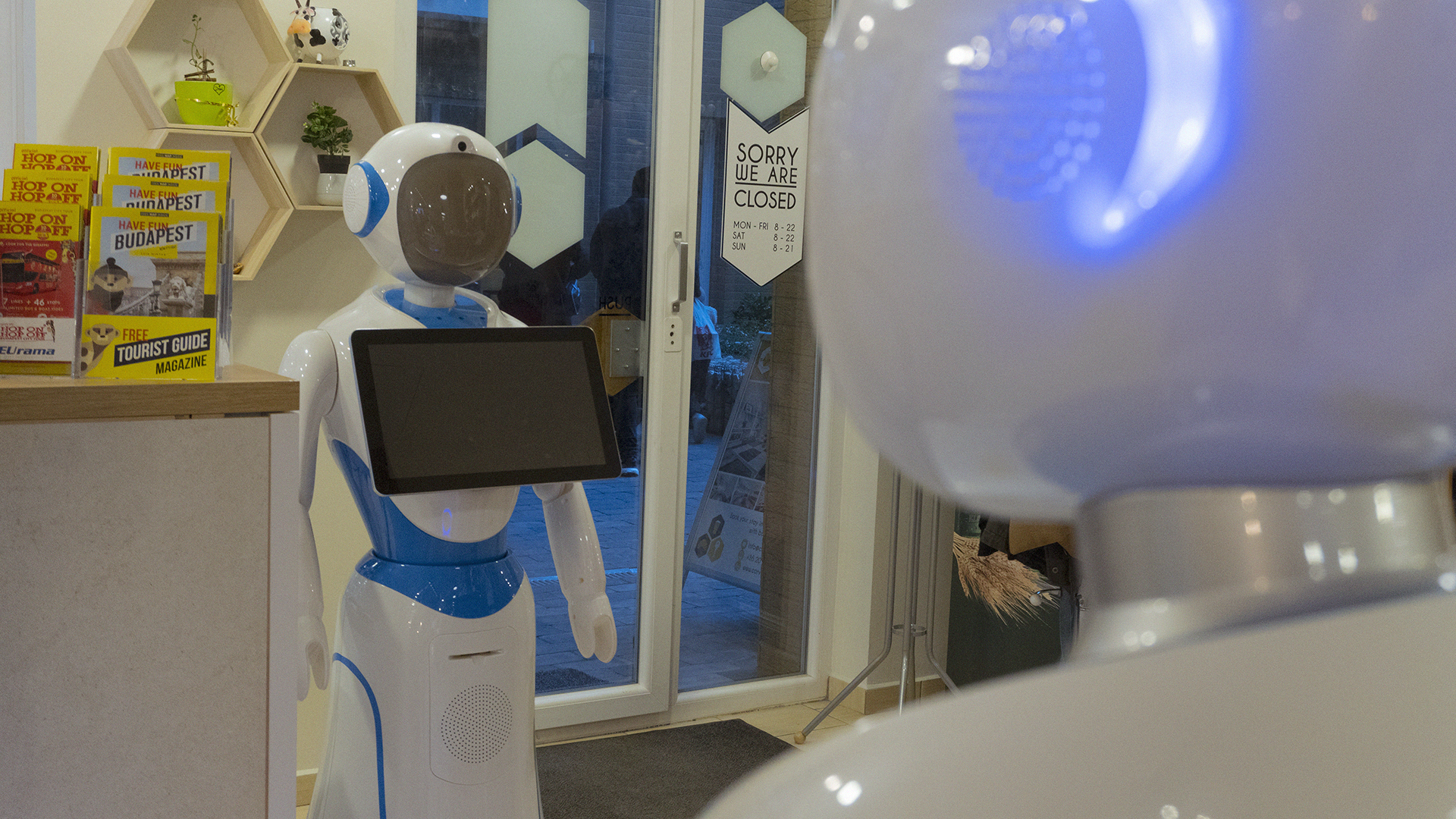
Jönnek a robotpincérek, már a Práter utcánál tartanak
Lassan Magyarországra is beteszik a lábukat a robotok, ha még nem is a spájzban vannak, de már majdnem: a nyolcadik kerületben pincérkednek. Megnéztük, hogy vajon hogy működnek, és megvizsgáltuk, elveszik-e a humán pincérek munkáját. Egyelőre ott tartanak, ahol egy szünidei balatoni pincér: rendelést még nem tudnak felvenni, néha kilötykölik az italt, de itt vannak, és legalább nem köpnek bele a levesbe.