Hogyan lát az önvezető autó?

Az önvezető autókban is használt lézerszkennerekről, működési elvükről és a technológia számtalan alkalmazásáról beszélt az októberi Budapest Science Meetupon Leichner Dávid, az MTA SZTAKI Gépi Érzékelés Kutatólaboratórium munkatársa.
A LIDAR (Light Detection and Ranging, fényérzékelés és távolságmérés) a mérőeszköz és a visszaverő felület távolságát határozza meg lézersugarak segítségével. A modern 3D lézerszkennerek több lézerkibocsátó és detektor alegységből állnak, és folyamatosan forognak – működési elvük hasonló a radarokéhoz. A LIDAR mérésekből kapott távolságokat térbeli pontokként reprezentálja a rendszer, ezt nevezik pontfelhőnek.
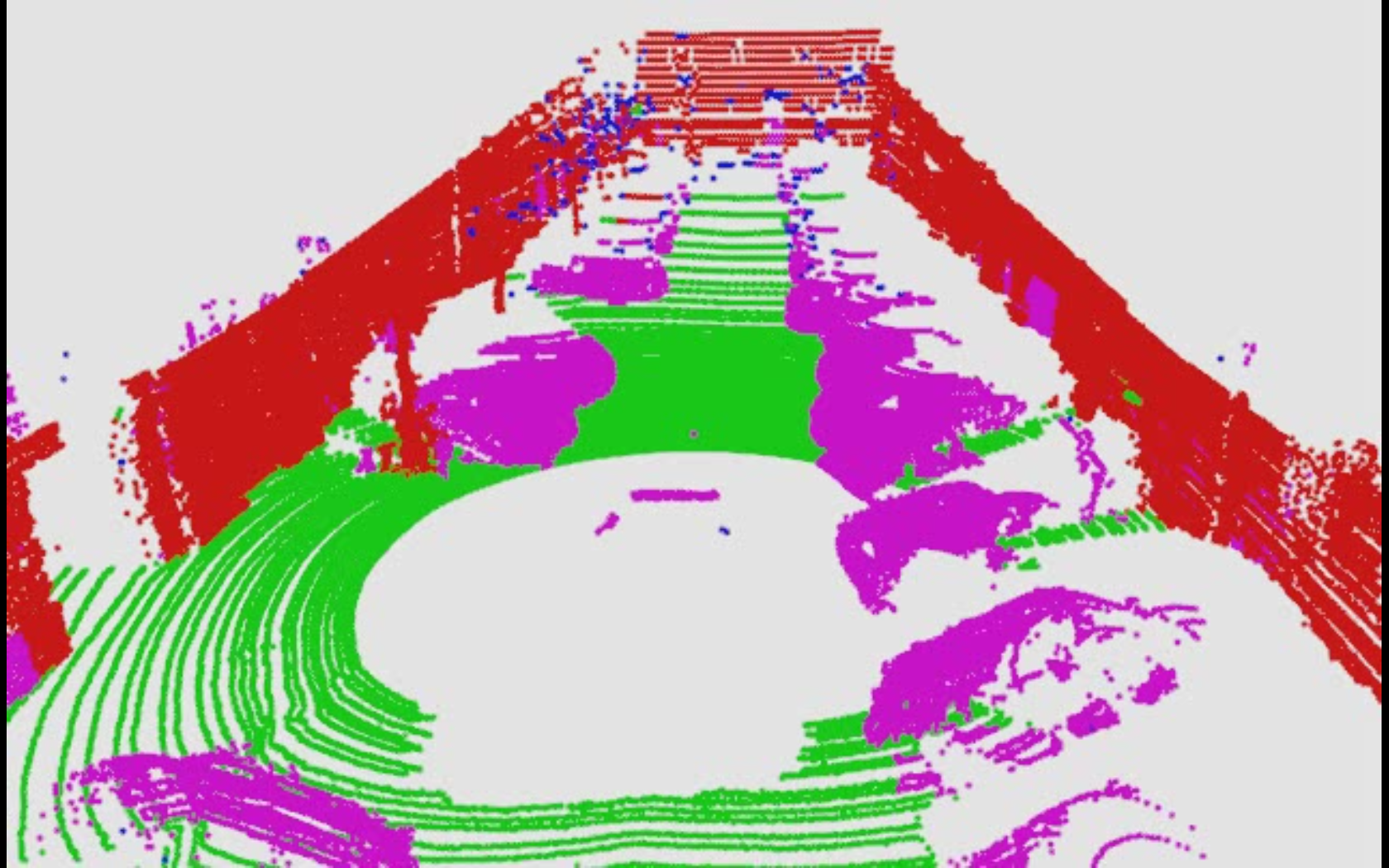
Az önvezető autókra szerelt lézerszkennerek akár 128 különálló lézersugarat is kibocsáthatnak, amelyek gyorsan, nagy felbontásban képesek feltérképezni a körülöttük található objektumokat. Ezek a fejlett detektorok rengeteg adatot gyűjtenek, amelyek valós időben történő feldolgozása komoly nehézségeket okoz. További hátrányuk, hogy jelenleg nagyon költségesek.
Ezekre a problémákra Leichner Dávid szerint a szenzorfúzió jelenthet potenciális megoldást. Ennek az a lényege, hogy korábbi lézerszkenneres térképezés során készített adatokat használnak az objektumok egy részének érzékelésére és címkézésére. Ebben az esetben az önvezető járművekben egy kisebb felbontású lézerszkenner használata is elegendő lenne, ugyanakkor ehhez részletes és gyakran frissített pontfelhőtérképekre lesz szükség.
A 3D lézerszkennereknek sok más alkalmazása is ismert, hasznosak lehetnek a városirányításban, régészeti munkákhoz, modellek készítéséhez. Az MTA SZTAKI-ban többek közt sikeresen használták a technológiát arra, hogy feltérképezzék Budapest növényzetborítottságát, valamint társasházak külső szigetelésének hatékonyabb megtervezésére.
Az előadás itt tekinthető meg:
Kapcsolódó cikkek a Qubiten:

Élet az első Uber-halál után: az USA államai sorra tiltják be az önvezető autók tesztelését
Kalifornia után Arizona is kiutasította az Ubert az első önvezető autó által okozott halálos közúti baleset után, miközben egyre több részlet derül ki, hogyan vette semmibe a cég a biztonsági előírásokat. Az Nvidia is felfüggesztette a teszteket.

Nemcsak a dugót és a parkolójegyeket, de a biciklizést és a teljes autós kultúrát is eltörölheti az önvezető járművek kora
A 2020-as évek a közlekedés teljes megújulását hozzák majd a legtöbb jóslat szerint, az új technológia viszont cserébe teljes iparágakat tehet tönkre, és az is kérdés, mi lesz a birtoklásra épülő autómániával.
