Magyar kutatók: Kutyákról érdemes mintázni a robotokat

Ha a robot hasonló viselkedéseket, „érzelmeket” mutat, mint a kutyák, akkor az emberek könnyebben tudják elfogadni őket társként – vetik fel magyar etológusok a Computers in Human Behaviour című szakfolyóiratban márciusban megjelenő cikkükben. Konok Veronika, az MTA-ELTE Etológia Tanszékének adjunktus által vezetett kutatócsoport nem kutyaként viselkedő – ugató, nyüszítő, farokcsóváló és lihegő – gépkedvencek megalkotására tesz javaslatot, hanem az etológia által feltárt jelenségek adaptálására.
Számos pszichológiai kutatás kimutatta ugyanis, hogy az emberek idegenkednek az emberszerű robotoktól. Mori Masahiro, a robotika japán professzora volt az első 1970-ben, aki a „borzongások völgye” allegóriájával írta le, miért nem célravezető humán robotokat előállítani. Formális levezetéssel is alátámasztott állítása szerint a tökéletesedési fázis közben az emberre már nagyon hasonlító robotok inkább elkerülést és félelmet váltanak ki, mintsem vonzalmat. Az etológusok szerint a kis mértékben eltérő fajspecifikus jellegekre mutatott efféle érzékenységre az állatok körében is akad példa. Az evolúciós ok a más fajhoz tartozó, de hasonló egyedek elkerülése lehet.

„Ezzel szemben az ember-robot interakció jó modellje például az ember és kutya között létrejövő szociális kapcsolat, amely azon alapszik, hogy a két faj egyedei képesek kölcsönösen felismerni egymás viselkedésformáit, az azokban meglévő sokszor lényeges eltérések ellenére is” – vázolta a Qubitnek a még nem publikált tanulmány hipotézisét Miklósi Ádám, az MTA-ELTE Etológiai Tanszékének vezetője.
Az állati viselkedéskutatás eredményeit a robotépítésben hasznosítani kívánó, Miklósi által már 2010-ben bevezetett etorobotika célja olyan modell felállítása, illetve tervezése, amely a robotok viselkedését az ember számára könnyen felismerhetővé teszi. Míg a robot fejét szimbolizáló monitoron megjelenő sematikus emberi arc zavaró lehet a kommunikáció során, egy majdnem tökéletesen emberszerű fej és mimika egyenesen ijesztő. Ráadásul, állítja Miklósi, a felhasználók emberszerű, fejlett „gondolkodási” képességeket várnának el a beszélő humanoid robotoktól, ennek megvalósításától azonban még nagyon távol vagyunk.
Az etorobotika alapvetése szerint egy segítő vagy társrobot formáját, illetve a tevékenységeihez tartozó viselkedésmintázatokat úgy kell kialakítani, hogy a könnyen felismerhető funkció mellett a robot tevékenysége is kiszámítható legyen. Az így tervezett robotok könnyebben illeszkedhetnek be az emberi közösségekbe, ugyanakkor specializált mivoltuk és a funkciójukra optimalizált (azaz nem emberi) kinézetük és viselkedésük elviselhetőbbé teszi őket.
Mit tud az etológia, amit a robotika még nem?
„Az etológia az állatok, illetve az ember természetes viselkedését egyaránt evolúciós szemszögből vizsgálja, így a humán diszciplinákhoz képest kevésbé emberközpontú hozzáállása inkább a funkcionalitást, azaz a hatékonyságot tartja szem előtt, és nem az ember valamiféle, minden szempontból (megjelenés, viselkedés…) ideális tökéletességéhez méri a többi fajt. Ilyen megközelítésből az emberek életét megkönyítő, segítő robotok leginkább valamiféle sajátos új faj képviselőiként képzelhetők el, amelyek az együttműködés során képesek megérteni emberi partnerüket, és megértetni magukat vele” – olvasható a Gácsi Márta, az MTA–ELTE Összehasonlító Etológiai Kutatócsoportjának tudományos főmunkatársa, Korondi Péter, a BMGE Mechatronika Optika és Gépészeti Informatika Tanszékének tanára és Kovács Szilveszter, a Miskolci Egyetem Informatikai Tanszékének docense által írt, az etorobotika lényegét összefoglaló tanulmányban.
A kutya szerintük azért is jó modell, mert képzettségétől, fajtájától, életkorától függetlenül rendelkezik egy olyan jellemző tulajdonsággal, amely megkülönbözteti minden más állatfajtól: kötődik az emberhez. Ez nem valami ködös jelenség, hanem egy etológiailag értelmezhető viselkedési rendszer, amely jól körülírható kritériumok mentén jellemzi a kutyák gazdájukkal kialakított, függőségen alapuló egyedi kapcsolatát.
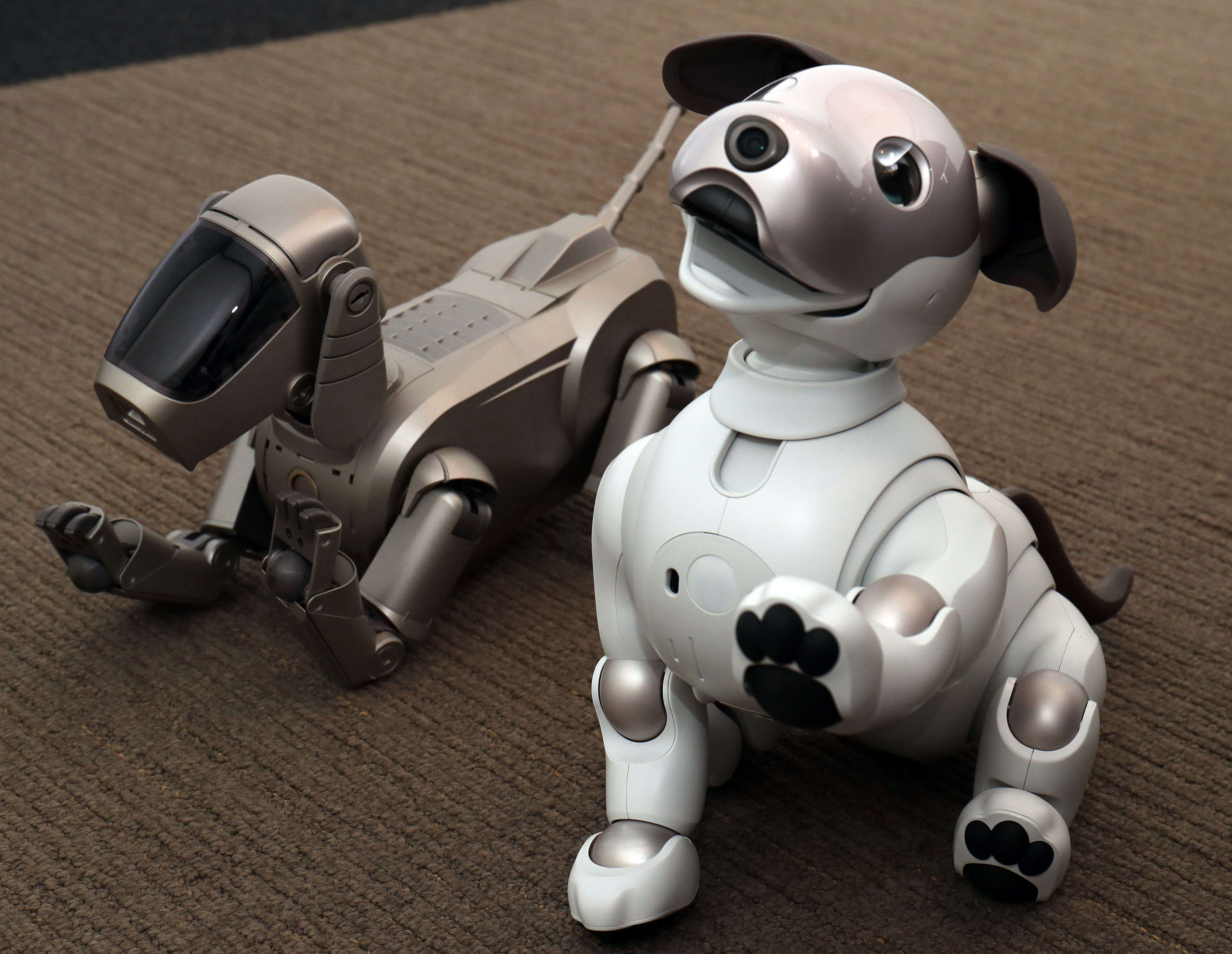
A Sony 1999-ben piacra dobott, mára popkulturális ikonná vált Aibo nevű robotja is kutyának tűnik. Idéntől az ötödik frissített verzióiban is megvásárolható játékszer kétségtelenül imitálja a társállatok viselkedésének néhány – külsődleges – jellemzőjét, de a kamerás gyerekfelügyeletet és a fényképezést mostanáig fontosabbnak tartották fejlesztői. A tavaly bemutatott, Japánban január második hetétől kapható legfrissebb kiadás mesterséges intelligenciája állítólag már képes lesz felismerni gazdája arcát és hálásan csóvál majd, ha megsimogatják a szenzorokkal érzékenyített fejét és hátát. A cukiságfaktort egészen odáig srófolnák gyártói, hogy külön díjas fejlesztéssel képessé tennék a szeretet viszonzására – pontosabban annak jelzésére is. Az Aibo azonban nyilvánvalóan nem etorobot.

A kutyákra jellemző „önkéntes” kötődés, az ember nem erőszakon alapuló vezetéséhez való alkalmazkodás, az emberi nyelvnél egyszerűbb, mégis hatékony kommunikációs csatornák használata, a kötődés által megalapozott figyelem és együttműködési készség a robotoktól is elvárt tulajdonságok közé tartoznak. A viselkedésökológia területén már régóta alkalmaznak különféle matematikai modelleket, és az informatikusok is gyakran indulnak ki az állatok viselkedésének szabályszerűségeit leíró algoritmusokból, ám arra, hogy miként is lehetséges a kutyák – az emberekéhez képest egyszerűnek tűnő – viselkedésformáit átültetni a robotokat irányító számítógépes programokba, még nem született hatékony megoldás. Miklósi szerint ennek elsődleges oka a technológia fejletlensége. „Az algoritmusok már készen vannak, a tájékozódást, az audiovizuális információ azonnali feldolgozását, a komplex reakciókat vezérlő hardverek azonban még váratnak magukra” – állítja az etológus.
MOGI Robi és MOGI Ethon, a proto-robotkutyák
Nem véletlen, hogy a 2013-ra elkészült első generációs prototípusok után a második nemzedék csak idén várható. Kétségtelen, hogy a Budapesti Műszaki Egyetemen évekkel ezelőtt létrehozott, az egyszerűbb helyváltoztatás okán kerekeken gördülő MOGI Robi ismerősöket üdvözlő farokcsóválása már egyfajta kötődést jelző gépgesztus, miként az is jól dekódolható, ahogyan a sosem látott vendéget eleinte oldalogva kerüli a robotkutya.
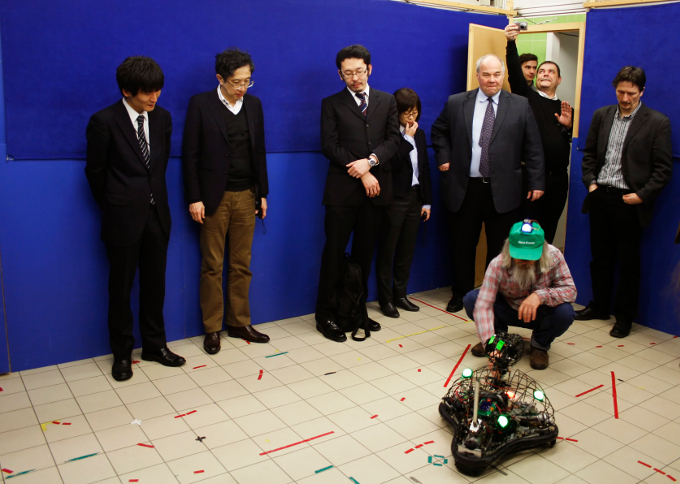
Egy másik, szintén 2013-as robotkutyamodell, MOGI Ethon az etológia tanszékének portása volt egy darabig, és különbséget tudott tenni ember és nem ember között, illetve a tanszéki munkatársak sebességéhez igazította a saját sebességét. „Következő lépésként azt szeretnénk elérni, hogy aki mellett elmegy, azt valamilyen módon üdvözölje. Másik cél, hogy a robot engedje be a vendégeket, s vezesse be a vendéglátójukhoz. Ha nincs bent, jelezze a vendégnek, hogy hiába jött. Nagyon könnyű ezt elmondani, de nagyon nehéz megvalósítani” – így a tanszékvezető.

Miklósi egyébiránt nem csupán ebben látja az etorobotika hasznát. A szintetikus etológia művelői olyan robotokat szeretnének létrehozni, amelyek segítik az állatok megismerését úgy, hogy azok emberi beavatkozás nélkül, társállatként tanulmányozzák a viselkedésüket. Miklósi a kutyák utánzásos tanulásának adaptálását is említi. „A gazda megmutatja a kutyájának, hogy mi a feladat, majd utasítja, hogy csinálja meg. Az utánzásalapú tanulás szabályának elsajátítása után a kutyák képesek arra, hogy új helyzetben is így tanuljanak. Ezt a gépi tanulás fejlesztésében is be lehetne vetni.”
10 forradalmi technikai újdonság a Las Vegas-i CES-ről, amik nélkül lehet ugyan élni, de minek
Feltekerhető tévé, okosbőrönd, okoshűtő, okosdugóhúzó és egy kis qubit – többek közt ezek az idei szórakoztató elektronikai kiállítás sztárinnovációi.