Eiben Ágoston, a robotszaporító: Áttörjük az élő és az élettelen közti határt

Tudósok robotevolúció útján készülnek létrehozni teljesen autonóm, önszaporító robotokat. Az elméletben már kidolgozott eljárás lehetővé teszi, hogy fizikai és digitális robotokat keresztezzenek egymással, ezáltal pedig robotbébik szülessenek – olvastuk a sci-fibe illő beszámolót február elején. A mesterséges evolúció továbbfejlesztését célzó projekt vezetője nem más, mint egy magyar kutató, Eiben Ágoston, az amszterdami Vrije Egyetem tanára, aki az ELTE matematika szakán szerzett diplomát.
Eiben a SZÁMALK-nál kezdte a pályát, majd friss diplomásként két évvel a rendszerváltás előtt kalandos körülmények között kijutott az Eindhoveni Műegyetemre PhD-ösztöndíjjal, és azóta is Hollandiában dolgozik. Szakterülete mindig is a mesterséges intelligencia, a mesterséges evolúció volt, de néhány évvel ezelőtt emelni akarta a tétet, fejébe vette, hogy megtestesíti az eddig kizárólag szimulációban zajló folyamatokat, és gyakorlatilag feltalálta a robotok szaporodását. Ennek a munkának az eredménye a félidőnél járó, angol és holland egyetemek partnerségével működő ARE (Autonomous Robot Evolution) projekt.

Hogyan foglalná össze röviden az ARE projekt lényegét?
A nagy kép azon a gondolaton alapul, ami már jó néhány éve a mottóm: tekintve, hogy az evolúció képes intelligenciát létrehozni, nagyon valószínű, hogy a mesterséges evolúcióból mesterséges intelligencia fakad. Ebből kiindulva a kutatás legfőbb iránya, hogy evolúció által hozzunk létre mesterséges intelligenciát. Ebben az a különleges, hogy nem nekünk kell programozni, tehát nem kell informatikusokat és mérnököket ráállítani, hogy lekódolják az intelligenciát, hanem másodkézből építünk – ezt nevezik second order engineeringnek. Először megalkotunk egy evolúciós rendszert, ami utána létrehoz egy intelligens rendszert. Ez lesz a világ első működő robotevolúciós rendszere, és rendkívül fontos, hogy megkülönböztessük a már létező rendszerektől. Ugyanis ami robotevolúcióban már létezik, mind szimulációban fut csak, mi pedig igazi robotokat akarunk létrehozni, igazi szaporodással, igazi szelekcióval.
Miben különbözik a robotevolúció útján létrejött mesterséges intelligencia attól, amit gépi tanulásnak nevezünk? A különbség elsősorban abban rejlik, hogy fizikailag is megvalósul az eredménye?
Három választóvonal van, az egyik, hogy ez az intelligencia megtestesül. A 20. század mesterséges intelligenciája – amivel én Pesten a SZÁMALK-nál kezdtem el foglalkozni, amikor lediplomáztam – kizárólag digitális MI volt, a nagy kihívás pedig, ami a kutatást évekig vezérelte, a sakk volt. A nyolcvanas években ugyanolyan fantazmagóriának tűnt, mint most a robotevolúció, hogy építsünk olyan intelligens komputert, ami meg tudja verni a sakkvilágbajnokot. Mai szemmel nézve ez nagyon korlátozott, hiszen az egész intelligencia csak a digitális univerzumban létezett, és a világa nem volt több, mint 64 fekete-fehér mező, ahol jól meghatározott figurákat jól meghatározott szabályok alapján felváltva kell léptetni. Ez nagyon messze van az emberi intelligenciától, de akár a delfinekétől, lovakétól, szarkákétól is. A 21. században elkezdett fejlődni a megtestesült intelligencia, amit köznapi nyelven robotikának szoktam hívni. Az egyik nagy különbség a gépi tanulás és a robotevolúció útján létrejött intelligencia között, hogy az előbbi a mai napig 98 százalékban a digitális univerzumban történik. Nagyon erős választóvonal, amikor ezt a komputerből kiszabadítva a való világban helyezzük el, ahol interakcióba lép a valósággal.
A másik nagy különbség, hogy a gépi tanulásban a felhasználó készíti elő az adatokat. Az ilyen projektek háromnegyed részben arról szólnak, hogy az adatokat be kell szerezni, integrálni kell, megtisztítani, majd feltálalni őket az algoritmusnak. A megtestesült intelligenciában viszont a gép maga kreálja a saját adatait, mert ha például elfordítja a fejét, vagy egy méterrel arrébb megy, megváltozik a szenzorain keresztül érkező input.
A harmadik, ami nem szakembereknek kevésbé látható, hogy miként viszonyul egymáshoz az evolúció és a tanulás mint két különböző megközelítés. Itt nem biztos, hogy elfogulatlan vagyok, de úgy gondolom, hogy az evolúciónak alárendelt a tanulás, de van, aki úgy véli, hogy a tanulás foglalja magában az evolúciót. Kompromisszumként azt mondanám, hogy legyen az adaptivitás a nagy fogalom, azon belül különböztessünk meg evolúciót és tanulást. Mi az adaptációnak egy alternatív formáját, nem a tanulást, hanem az evolúciót használjuk.
Mihez tudná hasonlítani a robotikában az ugrást, amit önök éppen végrehajtanak – akár a biológiai evolúcióból vett példával?
Most nagyon nagyot fogok mondani, de ez ahhoz hasonlítható, mint amikor a világegyetem fejlődése során áttört az élettelen és az élő szervezet közötti határ, milliárd évekkel ezelőtt, amikor a kémiából biológia lett. Azért gondolom, hogy ez az analógiája, mert a robotok, ahogy most ismerjük őket, egyszerűen gépek. A fúrógép például összetett gép, de még nincs automatikája, aztán vannak autók, amiket már tempomattal szereltek fel, azokban már van egy kis autonómia. Az önvezető autókban lesznek teljesen autonóm elemek, és maga az autó már önjáró robot – de még mindig gép lesz. Ezek ugyanis nem mutatják az élő rendszerek nagyon fontos tulajdonságait: nincsen metabolizmusuk, amit fenn tudnak tartani, nem szaporodnak, és ha tanulnak is, csak nagyon korlátozott mértékben. Amit mi meg akarunk és meg is fogunk valósítani talán ebben, talán a következő ARE projektben: áttörjük az élő és az élettelen közti határt, és el fogunk jutni egy olyan rendszerbe, ahol a robotok önszaporodók, öntanulók és önfenntartók, azaz fenntartják a maguk metabolizmusát.
Hogyan lát neki egy kutató egy ilyen vad ötlet megvalósításának?
Nagyon sok pályázatot adtam be erre az Európai Unióban és itt, Hollandiában a magyar OTKA holland megfelelőjéhez. Sajnos mindenhol elutasítottak, és az volt erre a visszatérő érvük, hogy ez science fiction, nem pedig science. Ha én evolúció által akarok értelmes robotokat létrehozni, ahhoz el kell érni, hogy a robotok szaporodjanak. Darwin elméletéből tudjuk, hogy az evolúció anélkül nem megy, kell a szelekció és a reprodukció. A kiválasztódás nem túl bonyolult, mert látjuk a robotokat, és amelyik jó, az mehet, amelyik nem, kiesik. A szaporodás viszont kőkemény feladat, mert mindenki úgy gondolja, hogy önszaporodó robotokat nem lehet létrehozni, méghozzá azért nem, mert úgy képzelik, hogy ez a természethez hasonlóan működik. A természetben a három lefontosabb trükk a szaporodásra az osztódás, a tojásrakás és a terhesség vagy vemhesség. Ha úgy gondolkodunk, hogy ezt kellene megvalósítani robotokban, az reménytelen. Ez volt az elutasítások egyik fő indoka.
Tehát nem az volt a problémájuk, hogy ez nem alkalmazható, nincs értelme.
A science fiction-érv az alkalmazhatóságot is firtatta, de segített, hogy az uniós pályázatokhoz szükség volt egy európai konzorciumra, és a Yorki Egyetemen dolgozó partnerek közül az egyik kollegát annyira elbűvölte az ötlet, hogy a harmadik elutasított brüsszeli pályázat után, 2017-ben azt mondta, hogy „tudod mit, Guszti? Hagyjuk Brüsszelt! Adjuk be az Egyesült Királyságban nemzeti pályázatnak.” Mivel holland vagyok, ehhez vendégtanári állást kellett kapnom az országban, ami meg is történt Yorki Egyetemen. Rajtuk kívül partner még a Nyugat-Angliai Egyetem Bristolban, ahol az ország legnagyobb robotlaboratóriuma működik, kétszáz robotikussal egy hatalmas helyen, irdatlan infrastruktúrával és agykapacitással. Plusz benne van az Edinburgh Napier Egyetem. A három egyetem részvételével beadott pályázatot meg is nyertük, ami hihetetlen élmény volt, hosszú évek frusztrációja omlott le rólunk, különösen rólam.
Hogy ott elfogadták az ötletet, talán azon múlt, hogy az Egyesült Királyságban nyitottabbak erre a fantasztikumra, de még inkább azon, hogy sikerült hozzá jó alkalmazást kitalálni. Alan Winfield robotetikus és ENSZ-tanácsadó zseniális ötlete volt, hogy ezek a robotok beválhatnak a régi atomerőművek radioaktív hulladékának eltakarítására. Az Egyesült Királyságban ugyanis van egy csomó régi, nem működő atomerőmű, és nem igazán lehet tudni, hogy mi van bennük, mert a tervrajzok eltűntek, az építtetők pedig már meghaltak. Egy jelentés szerint az elkövetkező száz évben fontmilliárdokban vagy -billiókban mérhető költsége lesz a hulladék eltakarításának. Ehhez képest eltörpül az a kétmillió euró, amit mi kaptunk.
A projektet bemutató cikkek címébe került, leginkább figyelemfelkeltő elem, hogy utódaik lehetnek a robotoknak. Ha ebből indulok ki, az a kérdés adja magát, hogy ha utódaik már lehetnek, vajon meddig mehetnek el az emberhez való hasonulásban. Például a vágyott robot-ökoszisztéma, ami az egyik végső célja lenne ennek a munkának, mennyire szimulálja majd az emberi társadalom felépítését?
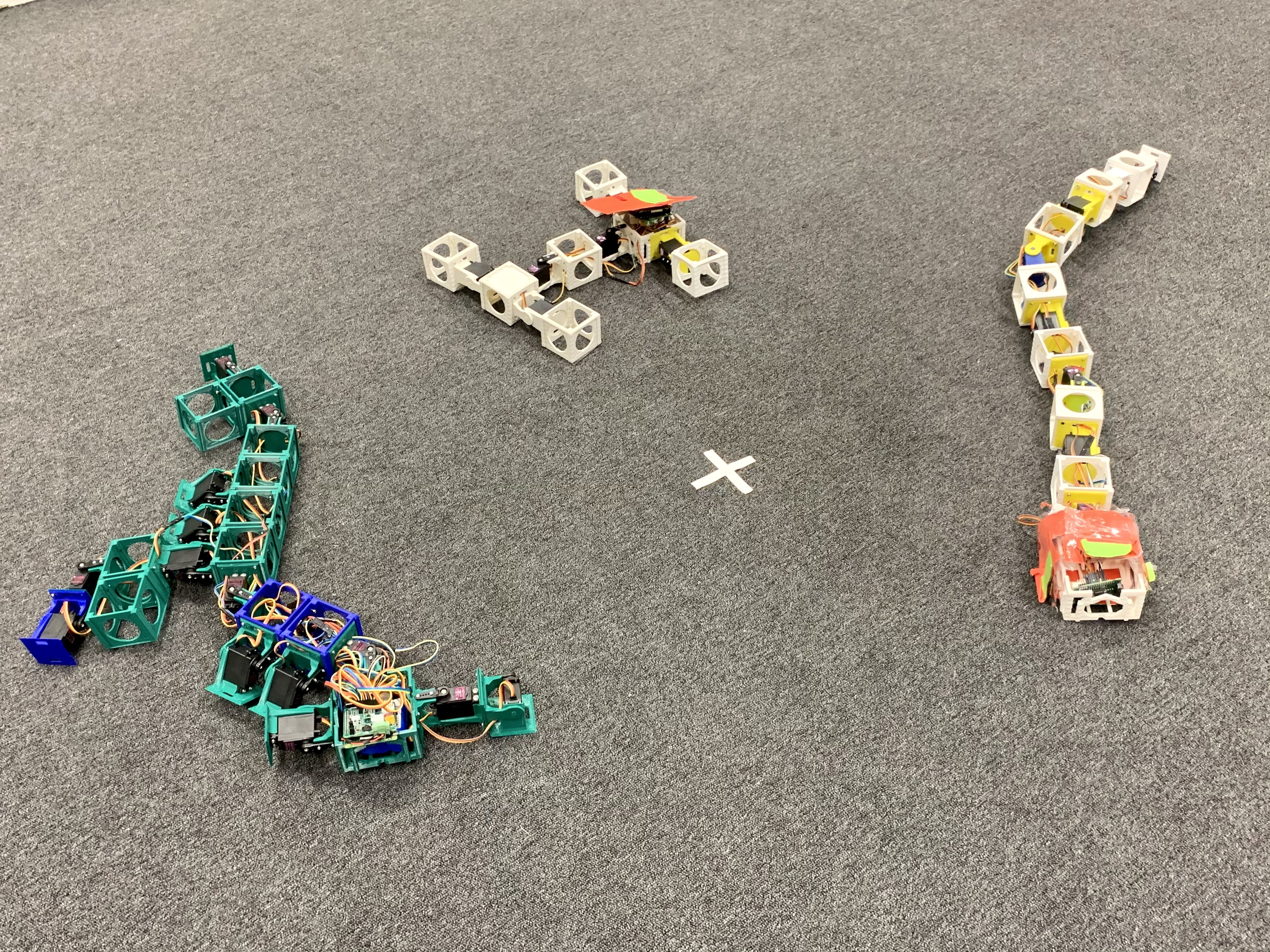
Egyáltalán nem fogja. Semmilyen technikai okot nem látok arra, hogy a robotevolúció ebbe az irányba tendáljon. Nagyon sokat beszélgettem biológusokkal az elmúlt években, és rengeteget tanultam tőlük az evolúció működéséről. Az egyik ilyen alaptétel, hogy a környezet meghatározza az evolúciót, tehát más állatok alakulnak ki a föld alatt, a vízben, a levegőben, a Szaharában vagy az Északi-sarkon. Így a robotevolúciót is az fogja meghatározni, hogy abban a környezetben, ahol őket elhelyezzük, milyen tulajdonságok lesznek előnyösek. Semmi okunk azt feltételezni, hogy két lábon járó, két karral rendelkező robotok fognak előállni, sőt mondhatni, hogy ez a két lábon járás eléggé strapás. Itt van nálam a világ első robotbébije, a 2016-os amszterdami robotbébiprojekt eredménye. Nem éppen úgy fest, mint egy ember, és azt sem feltételezhetjük, hogy pár millió év múlva már úgy fog kinézni.

Az evolúció működik, és az emberek már évezredek óta manipulálják tenyésztéssel, illetve nemesítéssel. Szerintem a robotevolúció ugyanilyen lesz – azzal a különbséggel, hogy az emberek irányítják a szelekciót. Képzeljünk el egy robotfarmot, ahol olyan robotokat akarunk nemesíteni, amik a dzsungelben mérik a környezetszennyezést. Ez nagyon nehéz feladat, óriási az úgynevezett tervezési tér, mert nem lehet tudni, hogy milyen az ideális robotforma. Legyen kicsi, hogy mindenhova beférjen, vagy legyen nagy, hogy letaposson mindent? Kereke legyen, lábai, vagy mindkettő? Legyen egy feje elöl, egy pedig hátul? Ilyenkor kell az evolúcióhoz fordulni. Ezt úgy oldanánk meg, hogy építenénk egy kis dzsungelt, vagy kimennénk a kertbe, és megnéznénk, hogy az önszaporodó robotszisztémánkból származó robotok közül melyik képes túlélni az adott környezetben. A kísérlettervező ott van, jegyzi az eredményeket, és megmondja, hogy melyik robot melyikkel szaporodjon. Ezt addig folytatjuk az evolúciós robotokkal, amíg el nem jutunk egy robotcsaládhoz vagy -törzshöz, ami jól megél a dzsungelben, és el tudja látni a feladatot. Akkor pedig befagyasztjuk az evolúciót, mert ez lesz az ideális robot, ebből kérünk szépen ezer darabot, és elküldjük őket az Amazonashoz.
Ha a távoli jövőben ezeket a folyamatokat majd önállóan bonyolítják a robotok, versengés támad köztük? Mit kezdenek azokkal az egyedekkel, amik nem válnak be?
Pontosan erről van szó, az evolúció lényege a legerősebb vagy legalkalmasabb túlélése, „survival of the fittest”. Ettől nem félni kell, hanem felkarolni, kicsit menedzselni, irányítani, hogy abba az irányba menjen, amelyikbe mi akarjuk terelni. Lesz versengés, szó szerinti élet-halál harc, ahogy a természetben. És hogy mi lesz az alkalmatlanokkal? Attól függ, hogy miből készültek. Ha mechatronikus alkatrészeik lesznek műanyagból, rézdrótból és hasonló anyagokból, akkor az a cél, hogy ezeket valahogy újrahasznosítsuk. Ha biológiailag lebomló anyagból készülnek, akkor ott maradnak, ahol vannak, és ugyanúgy, ahogy egy macska vagy egy madár teteme, egy idő után a robot is el fog enyészni. Jelenleg azonban nem lehet lebomló anyagokból robotokat készíteni, így az első 5-10 évben nekünk kell majd odamenni, vagy valahogy gondoskodni róla, hogy ha valahol a világ másik végén egy robot megszűnik működni, ne maradjon ott szemétnek.
Milyen időtávon tud megvalósulni egy-egy ilyen földi projekt, például a radioaktív hulladék eltakarítása?
Öt év. Ennek a munkának a mérnöki része sokkal nehezebb és sokkal fontosabb, mint kezdetben gondoltam. Matematikus vagyok, inkább elméleti vagy koncepcionális szinten fejlesztettem, algoritmusokban gondolkoztam, nem pedig abban, hogy hogyan jön ki a 3D nyomtatóból egy robot. Most, hogy a négyéves projekt feléhez értünk, ott tartunk, hogy tudjuk, hogyan kell. Épp egy órája volt projektmeetingünk, ahol a bristoli kolléga elárulta, hogy mit a legnehezebb megoldani – soha nem találná ki az ember –, a drótokat, a kábeleket, amiken az elektromos áram és az adatok mennek. Ezt a projektet két év múlva befejezzük, és onnantól még egy ilyen projekt elég lenne. Tehát mostantól öt év múlva tudná ezt a csapatunk megvalósítani.
Hányan vannak a projektcsapatban?
Edinburgh-ban kettő, Bristolban kettő, Yorkban négy, Amszterdamban kettő, összesen 10 fős a csapat, ami néha kiegészül PhD-diákokkal és külsős kutatókkal.
Úgy képzeltem, hogy nagyságrendekkel nagyobb a létszám.
Ez olyan, hogy ha egy ember egy óra alatt kiás egy gödröt, az nem azt jelenti, hogy hatvan ember egy perc alatt ássa ki. Ennyire nem egyszerű. A lockdown sajnos lelassított minket, pandémia nélkül sokkal előrébb tartanánk. Amikor az Egyesült Királyságban megkaptuk az ARE projekt finanszírozását, elfogott kicsit az irigység, hogy ha már én amszterdami professzor vagyok, jobb lenne, ha itt is menne a munka – ez végül sikerült, aminek nagyon örülök. A Vrije Egyetem, ahol dolgozom, látta, hogy ez tényleg tudományos mérföldkő lesz, és volt annyira vagány és bőkezű, hogy adott 250-300 ezer eurót, hogy fölvegyek én is egy kutatót erre a 4 évre. Tehát a projekt mostani állapotában már négy partner van, ami mindenkinek nagyon jó, mert az amszterdami laborban kicsit mások a robotjaink, mint a bristoliban. Többféle szemszögből meg tudjuk nézni ugyanazt, van egy elméletünk, amit le tudunk tesztelni így is meg úgy is, és ez jót tesz a megalapozottságnak.
Mit tudnak majd felmutatni a mostani ARE projekt végén?
A projekt végére meglesz a működő szaporodórendszer. Nagyon fontos megemlíteni, hogy ez nem az osztódásnak, a tojásrakásnak vagy a terhességnek a robotikus megfelelője lesz, hanem egy teljesen más rendszer, ami a szükségből erényt kovácsol. Az a megoldás, hogy legyen egy nem a robotokon belül működő, hanem külső infrastrukturális facilitás, ami a robotgyerekeket készíti. Egyszerűsítve mondhatjuk, hogy a 3D printer az anyaméh. Ez a szükség, ugyanis másként nem tudnánk megcsinálni. Terhes robotok? Én szeretem a vad ötleteket, de ebbe nem kezdenék bele. Az erény pedig, hogy ezáltal van egy kapcsolója a rendszernek.
Mint afféle etikus tudós, gondolok arra is, hogy mi a hatása annak, amit csinálok, és elég hamar beláttam, hogy ennek veszélyei is lehetnek. A 20. század közepén elméleti fizikusok és matematikusok az atomról gondolkoztak, a világegyetem születését akarták modellezni, és mellékesen készítettek egy atombombát. Harminc évre rá jött a molekuláris biológia áttörése, próbálták megérteni az élet kódját, a DNS-t, de lettek belőle biológiai fegyverek is. Tehát van már nuclear hazard, biohazard, és ha harminc évet előre ugrunk a mára, akkor vannak olyan őrültek, mint én, és ebből következhet a robohazard. Azt azért nem szeretném, ha az én munkám következményeként rászabadulna az emberiségre valami önszaporodó robotfalka, mint az ausztráliai dingók. Ennek megelőzésére nagyon fontosnak találom, hogy az evolúciós rendszer megállítható legyen, ehhez pedig az a kulcs, hogy a szaporodás ne történhessen meg bárhol és bármikor. A megosztott szaporodási rendszer helyett mi éppen hogy központosított szaporodási rendszert akarunk. Egy hely van, ahol a robotokat készítjük, és ha ezt kikapcsoljuk, abbamarad az evolúció.
Az ARE projekt végén tehát leteszünk az asztalra egy működő robotreprodukciós rendszert, amelyet eredetileg úgy hívtunk, hogy birth clinic, aztán átkereszteltük reproduction centerre, most meg úgy hívják, hogy RoboFab (a robot fabrication-ből). Ez hatalmas áttörés, mert ilyet még senki nem csinált, és sok szakember még pár évvel ezelőtt is azt gondolta, hogy lehetetlen.
Tudna példát mutatni a már kézzel fogható evolúciós termékekre?
Megkerestem hozzá egy videót, amin az látszik, hogy szimulációban, tehát nem fizikailag evolvált robotok olyan magatartást tanúsítanak, mint az állatok. Nem úgy néznek ki, de úgy viselkednek. Az egyik PhD-diákom egy biológussal összefogva demonstrálta, hogy egy-egy általa evolvált robot mozgása milyen állatokéra emlékeztet: volt például pingvinszerűen, gyíkszerűen és kígyóként mozgó robot, és volt, amelyiknek a mozgása a víz tetején futkosó molnárpoloskáéra hasonlít. Ez igen érdekes példája annak, hogy a mesterséges evolúció nagyon hasonló megoldásokra tud jutni, mint a természetes. Mi, élőlények szénből, hidrogénből és oxigénből állunk nagyrészt, ezt wetware-nek nevezzük a hardver és a szoftver mintájára. A szoftveres evolúció pedig olyan megoldásokat hozott ki, mint a wetware, ami megdöbbentő, mert azt jelenti, hogy valahol a mélyben van valami összefüggés, valami erő, ami minden inkarnációban működik.
Mesterséges evolúció által egyszerűbb eszközök is létrejöhetnek?
Az evolúciós alkalmazások külön kategóriája, amikor nem robot a folyamat vége, hanem fizikai objektum. Egy példa: egy 15 évvel ezelőtti NASA-projektben mikroműholdra kellett antennát tervezni. Megvoltak a mérnöki paraméterek, hogy minek kell eleget tegyen az eszköz, például hogy mennyi energiát használhat, és milyen stabil legyen a hullám. Kiadták egy alvállalkozónak, de közben két fiatal srác heccből kitalálta, hogy ráeresztik az evolúciót. A mesterséges fitnesst, vagyis az evolúciós alkalmasságot úgy definiálták, hogy minél jobban teljesítette az antenna a mérnöki paramétereket, annál alkalmasabb lett. Építettek egy rendszert, amiben komputerszimulált antennák mutálódtak és kereszteződtek egymással, a fitnesst pedig mindig úgy mérték, hogy ráengedték a specifikációkat, és látták, hogy az új antennák egyre nagyobb mértékben teljesítik azokat. Végül találtak megoldásokat, amik 100 százalékban eleget tettek a mérnöki paramétereknek – és úgy néztek ki, mintha egy hatalmas buli után, másnapos fejjel rajzolta volna őket valaki.
Nem szimmetrikus, nincs két egyforma ága annak az antennának, egyetlen értelmes mérnök sem tervezne ilyet, mégis bemérhetően sokkal jobb volt, mint amit mérnökök vonalzóval, egyenes, szimmetrikus dizájnokkal létrehoztak. Ezt meg is építették, a NASA pedig visszavette a megbízást az alvállalkozótól, és átadta ennek a két fickónak.
Elég nagy univerzumot nyit, ha a természethez hasonlító megoldások jobban működnek, mint a tervezőasztalon készülők.
Ha tervezési problémát kell megoldani, az evolúció a legjobb tervező, amit ismerünk. Ebből adódik, hogy ne törjük a fejünket a megoldáson, hanem építsünk egy evolúciós rendszert, és az majd megoldja a dizájnproblémákat. Erre több példa is van, és azokban az esetekben, amikről tudok, a mérnökök azt mondták, hogy ez a bizarr dizájn nem működhet, ez rossz. De bemérték, és mindig működött. Ebből mi következik? Az evolúció a kreativitásával is meg tud minket döbbenteni. Ausztrália felfedezése előtt senki nem rajzolt olyan állatot, aminek zsebe lett volna. És ez fog történni a robotokkal is.
A projektben digitális robotklónokat kereszteznek majd kézzel fogható, fizikai robotokkal. Hogyan lehet összehozni ezt a házasságot?
Ez az én ötletem volt, az egyik EU-s projektpályázatba írtam bele. A trükk utólag elég egyszerűnek tűnik: a genetikai nyelvnek ugyanannak kell lennie a szimulációban, mint a fizikai világban. Az életben a DNS bázispárjai jelentik a genetikai nyelvet, de a komputerben olyan genetikai nyelvet írunk, amilyet akarunk. A szakirodalomban rengetegféle genetikai nyelvet találtak ki a kutatók, és használják is a mesterséges evolúcióban. Az egyetlen, de nagyon fontos trükk tehát, hogy a szimulált robotoknak és a fizikai robotoknak közös legyen a genetikai kódja. Így a fizikai robot DNS-e átültethető a szimulált világba, és ugyanúgy, a digitális robot DNS-e elküldhető a fizikai világba, hogy megtermékenyítsen egy fizikai robotot – mert a robotszaporodás ugyanúgy működik, mint a szexuális szaporodás az élővilágban. A paparobot és a mamarobot összekevert DNS-éből lesz egy olyan DNS, ami nem létezett eddig, és az kódol egy új robotot – a gyereket. Az újdonság az, hogy a DNS-ből mi meg is fogjuk tudni építeni a fizikai robotot. Ez szerepelt a projekttervekben már 2017-ben, de még nem létezik, és egyelőre kérdéses, hogy sikerül-e megvalósítani az ARE projekt vége előtt, vagy sem. A hogyant már tudjuk, kitalálni már semmit nem kell, de mérnöki és programozási feladatok még hátra vannak, amiket a lockdown jelentősen lassít. Ennek az évnek a végére két szülőklinikánk, vagyis RoboFabunk lesz, ezáltal pedig nemcsak egy szimulált és egy valóságos robotpopulációnk lesz, hanem a valóságos robotpopulációnak is lesz egy bristoli és egy yorki része.
Hogy jut az ember eszébe, hogy a robotok evolúcióját létrehozza? Ön sci-fi-rajongó?
Az vagyok, valóban. De ez nem azok közé az ötletek közé tartozik, amit egy fantasztikus könyvben olvastam, aztán rájöttem, hogy jé, egyetemi tanár vagyok, ha akarom, megcsinálom. Volt ilyen projekttervem is egyébként, és arra kaptam is pénzt. Egy Stanisław Lem-novella alapján készült, ami arról szólt, hogy egy mesterséges világ virtuális lakói kifejlesztik a saját filozófiájukat, és elkezdenek gondolkozni, hogy létezik-e teremtő, hogy ők honnan származnak. Ezt leírtam tudományosan, és megkaptam rá a pénzt. Más idők jártak annak idején, 2004 körül.
A robotevolúció ötlete pedig abból fakadt, hogy elkezdtem szakmailag unatkozni. Mesterséges evolúcióval foglalkozom már a kilencvenes évektől, és ez lett a karrierem, benne volt a PhD-mben, írtam róla könyvet, amiből a világ számos egyetemén tanulják a diákok a szakmát. Egy idő után karrierközepi válságom lett, és hatalmába kerített az érzés, hogy most már kellene valami új. Gondolkoztam, hogy Mauritiuson nyitok egy csónakkölcsönzőt, de a feleségem és a gyerekek nem akartak belemenni. Úgyhogy maradtam abban, hogy egyetemi tanárként megpróbálok változtatni azon, amit csinálok. Rájöttem, hogy a nagy kihívás az lenne, ha az evolúciót kiszabadítanám a komputerek fogságából, és fizikai objektumokba implementálnám. Erre találtam ki egy 2012-es cikkben az Evolution of Things koncepcióját az Internet of Things mintájára. Utána rájöttem, hogy ehhez is két út vezet: evolválhatunk passzív objektumokat, mint egy antenna vagy egy napszemüveg, azt is kitaláltam, hogy hogyan lehetne evolúciós pólódizájnt csinálni. De még ennél is lehet nagyobb kihívást találni: ha nemcsak passzív, mezei tárgyakat evolválunk, hanem aktív, működő tárgyakat, amiknek van agyuk.
A 3D nyomtatás fejlődése nélkül ez az egész nem is működhetne?
Nem. És egy kicsit sajnálom, hogy az a technológia még nem tart ott, hogy nagyon fontos robotalkatrészeket, például processzorokat, szervómotorokat ki tudjon nyomtatni. Elektromos áramkörökhöz rézdrótokat talán egy-két éven belül lehet 3D printelni, de az elkövetkező öt évben nem lesz olyan nyomtató, amelyik egy teljesen kész, működőképes robotot ki tud nyomtatni. Ezért a mi megoldásunk a háromdimenziós nyomtatásnak és az előre elkészített alkatrészeknek a kombinációja. A robot agya a Raspberry Pi, amiből például vennünk kell egy csomót, az „ízületeiben” pedig szervómotorok találhatók, amiket szintén nem lehet kinyomtatni, ebből is kell több száz darab. A szülőklinika úgy működik, hogy a 3D printer kinyomtat egy bizarr formát, és egy robotkar – az előre elkészített alkatrészeket úgy hívjuk, szintén természetes analógiával, hogy szervek – a szervbankból kivesz egy kereket, bedugja, egy szervót, bedugja, összeköti a kábeleket, míg el nem készül a robot.
Volt egy érdekes művészeti projektje a Hágai Művészeti Múzeumban, ahol, ha jól értem, Escher-művek evolúciója ment végbe.
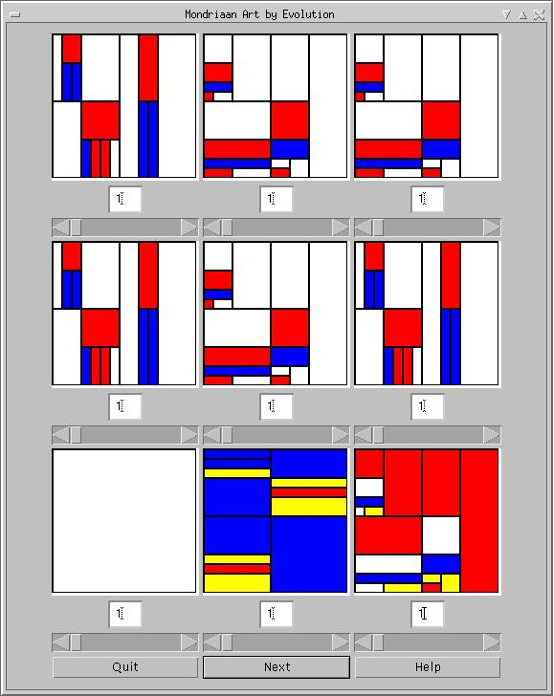
A kilencvenes évek végén szintén egy kicsit unatkoztam, és kerestem valami érdekesebb alkalmazását az evolúciós számítástechnikának. Az volt az ötletem, hogy mi lenne, ha Mondrian képeit evolválnánk. Az ő geometrikus korszakában készült képei eléggé egyszerűek, egyenes vonalakkal, egyszerű színekkel. Erre nagyon könnyen ki tudtam találni egy genetikai nyelvet, egy digitális kódot, amit gond nélkül át lehetett tenni rajzba. Rájöttem, hogy a kódokat keresztezni tudom egymással, és innentől beindult az egész. Volt egy user interface, amin a felhasználó kilenc véletlenszerűen generált képből szelektálhatott. Kiválasztotta, amelyik a legjobban tetszett neki, a többit eldobta a rendszer, a két kedvencnek pedig lett sok „gyereke”, amik betöltötték az üres helyeket. Ez volt az első generáció. Ezt megvalósítottam a diákjaimmal, és elmentem a Hágai Művészeti Múzeumba – ez olyan, mint Budapesten a Műcsarnok –, ahol megmutattam az igazgatónak. Azt mondta, hogy fél év múlva lesz egy hatalmas Escher-kiállítás, ahová az egész világról összeszedett műveket hozzák haza, és megkérdezte, hogy „Eschert nem tudnál?”.
Egy hét gondolkodási időt kértem, beszéltem a diákjaimmal, aztán felhívtam, hogy „de, tudunk Eschert is”. A fő megoldandó probléma azt volt, hogy hogyan kódoljunk Escher-szerű műveket, a másik probléma, a szelekció már sokkal egyszerűbb volt. Ez 2000-ben történt, amikor még nagyon drága technológia volt a lapostévé, 20 ezer guldenbe került, amit majdnem egy éves fizetése volt egy ilyen kutatónak, de a Philipsen keresztül sikerült finanszíroznunk hat ilyen méregdrága képernyőt. Ott lógtak a múzeum falán a művek között, és mindegyiken egy kép volt, alatta pedig két gomb, a zöld jelezte, hogy tetszik, a piros pedig, hogy nem. A látogatók nyomkodták a gombokat, mi pedig gyűjtöttük a szavazatokat, és a szavazatok száma jelentette az evolúciós fitnesst. Meghatározott időközönként azoknak a képeknek lettek gyerekeik, amik a legtöbb szavazatot kapták, a többit pedig eldobtuk. A tudományos érdekessége ennek a projektnek az volt, hogy én azt hittem, ha fél évig Eschereket evolválunk, akkor előállnak olyanok, amik tényleg nagyon hasonlítanak az igazi Escherre. És voltak is olyan periódusok, amikor efelé ment az ügy, de aztán elveszítettük ezeket a képeket. Utólag már tudom, hogy miért: mert nem voltak konzekvensek a szavazatok. Bejött három busznyi japán turista, elolvasták, mi van odaírva, elgondolkoztak, és megnyomtak egy gombot. Délután megérkezett három busznyi iskolás, a gyerekek rávetették magukat, és össze-vissza nyomkodták a gombokat. Bármi, ami elindult trendnek, azonnal behalt, mert a szelekció teljesen randommá vált ezáltal.

Hogyan kerül ki valaki az ELTE matek szakról nagy nyugat-európai robotlaborokba?
Két évvel a rendszerváltás előtt jutottam ki annak köszönhetően, hogy az ELTE matematikus szaknak volt egy csereegyezménye az Eindhoveni Műegyetemmel. Ezen keresztül eljutottam Hollandiába, lettek holland barátaim és egy holland barátnőm, úgyhogy amikor lediplomáztam matematikusként, ki szerettem volna menni egy évre oda vendégkutatóként. Ez nem működött, de sikerült kicsempésznem a diplomámat és kimennem Eindhovenbe. Ez még a rendszerváltás előtt volt, tehát tilos volt a diplomát kivinni, de volt egy egész jó húzásom, bementem a politikai kapcsolattartóhoz, és mondtam, hogy megyek ki Hollandiába dolgozni, csak ki kell vinnem a diplomámat, úgyhogy kérek hozzá engedélyt. Nem tűnt fel neki, hogy ez kalózakció, azt gondolta, hogy a főnököm küld, eszébe sem jutott, hogy valaki ennyire pofátlan, úgyhogy megírta az engedélyt, amivel minden további nélkül átengedték a határon a diplomámat. Megkerestem kint egy egyetemi tanárt, aki azt mondta, hogy egy évre nem tud meghívni, csak majd ha híres leszek, de négy évet tudna ajánlani PhD-ösztöndíjjal. Elmentem a magyar követségre, ahol miután megtudták, hogy így jöttem ki, haza akartak küldeni hatósági engedélyért, meg levizsgázni angolból és matekból. 30 napra volt kiutazási engedélyem, és a 29. nap kitaláltam, hogy itt maradok, lesz, ami lesz. Két év múlva jött a rendszerváltás, épp jókor, mert már majdnem lejárt az útlevelem, és így a holland rendőrség nem tudta volna meghosszabbítani a tartózkodási és a munkavállalási engedélyemet. Ez után két évvel megvédtem a disszertációmat. Volt egy olyan pillanat, amikor visszamehettem volna Magyarországra, ha akarok, de akkor áthívtak Eindhovenből Amszterdamba, és úgy gondoltam, jobb lesz nekem itt. Amszterdamban voltam posztdoktor, utána Utrechtben, majd Leidenben lett állásom, aztán megint Amszterdamban, ahol az egyetemi tanári katedrát megkaptam.
Nem kísértette meg soha, hogy visszatelepüljön, és itt tanítson, itt reformáljon meg dolgokat?
Volt egy nagyon jó intézmény a Várban, a Collegium Budapest nevű advanced study intézet, ahova meghívtak egyszer egy vendégelőadásra. Az előadás után beszélgettünk, és előállt az a lehetőség, hogy elmenjek oda fél évre, és nagyon komolyan elgondolkoztam, de aztán addig huzakodtam, amíg nem lett belőle semmi. Aztán a Collegium Budapest bezárt, az advanced study és open intézményeknek befellegzett. Az ELTE-n vannak fizikusok, akikkel remekül tudok együtt dolgozni, és két éve volt egy közös cikkünk, aminek nagyon jó fogadtatása volt. Ők drónrajokat hoznak létre a madarak röptét elemezve, és ezen a projekten én is velük dolgoztam. Egy éve is visszamentem, mert a holland tévé készített egy dokumentumfilmet erről, amit szintén együtt csináltunk. Semmi kifogásom nincs az ellen, hogy magyarokkal dolgozzak együtt, de önmagában az, hogy magyar valaki, nálam nem előny.
Van valami, amit ajánlana a magyar egyetemeken tanuló feltörekvő matematikusoknak, fizikusoknak? Hogyan menedzseljék magukat úgy, hogy több lehetőséghez jussanak?
Röviden: think big, vagyis gondolkodj nagy léptékben. Amikor oda jártam egyetemre, az egy másik ország volt, más hely és más idő. Utána meg kellett szabadulnom azoktól a kötöttségektől, amik a gondolkodásomba ivódtak az iskolában, a gimnáziumban és az egyetemen. Ez mindig arra mutatott, hogy ne fújjuk fel a dolgokat, csak szerényen, a vad ötletek nem élveztek támogatást. Az igazi jó tudósok és mérnökök, akik valami nagyot alkottak, tudtak nagy léptékben gondolkodni. Lehet teljesen jó életfilozófia, hogy én csak egy apró fogaskerék vagyok egy nagyobb kerékben, ami egy nagyobb gépnek a része – akármilyen beképzelt valaki, ezt belátja előbb-utóbb. Ezzel együtt azt mondom, hogy sokkal érdekesebb lesz az élete valakinek, hogyha tud, mer nagyobb léptékben gondolkodni, és nem öncenzúrázza az ötleteit. És nem riad vissza attól, hogy néha egy kicsit bombasztikusan, a populáris tudomány terminológiájában fogalmazza meg az ötleteit, illetve publikálja az eredményeit.
Lehet unalmas táblázatokban publikálni, és úgy is, hogy készítek egy videót, ami hirtelen virálissá válik. Amikor a robotbébiprojektet 2016-ban bemutattuk az utrechti techfesztiválon háromezer ember előtt, az médiaesemény lett Hollandiában. Bekerült a napi fő híradóba, a legnagyobb holland napilapba, és az egész országban híres lettem arra a 15 percre, mert sikerült úgy tálalni. Egy újságíró úgy nevezett, hogy a robotbébi nagyapja – mert a szülők robotok voltak, ez tény. De én mint nagyszülő, még mindig belefértem a képbe.
Kapcsolódó cikkek a Qubiten:

Utódokat is létre tudnak hozni az idegen bolygók kolonializálására szánt robotok
Egy nemzetközi kutatócsoport évek óta dolgozik a saját evolúcióját lefolytatni képes forradalmi robotfajon, hogy a távoli jövőben az emberi felügyelet teljes hiányában végezhessék el pionírmunkájukat távoli égitesteken. A négyéves projektnek már vannak figyelemre méltó eredményei, például a mesterséges evolúciós algoritmus.

Domokos Gábor: Együtt élek a gömböccel, annak összes előnyével és hátrányával
Ha nem engedjük meg egy tudósnak, hogy 99 százalékban tévedjen, akkor nem tudja a maradék 1 százalékban a zsenialitást előhozni – mondja Domokos Gábor építészmérnök, a világhírű gömböc feltalálója. Szerinte bőven vannak még alapvető természeti törvények, amiket fel lehet fedezni, de a mai teljesítménykényszeres, gazdasági hasznosíthatóságra épülő tudományos életben kicsi az esély az ilyen felismerésekre.
A madarak röptét elemezve alkottak szuperhatékony drónrajt az ELTE kutatói
Vicsek Tamás és kutatócsoportja biológiai motivációjú algoritmusokat és az evolúció elvét használták a csoportos drónvezérlés megalkotásához. Olyan drónokat fejlesztettek, amelyek nagyméretű rajokban egymással beszélgetve repülnek közös céljuk felé, és csoportosan kerülik el az akadályokat, akár a madarak.